mirror of
https://github.com/opencv/opencv.git
synced 2025-07-20 11:06:38 +08:00
Merge pull request #23264 from AleksandrPanov:add_detect_qr_with_aruco
Add detect qr with aruco #23264 Using Aruco to detect finder patterns to search QR codes. TODO (in next PR): - add single QR detect (update `detect()` and `detectAndDecode()`) - need reduce full enumeration of finder patterns - need add finder pattern info to `decode` step - need to merge the pipeline of the old and new algorithm [Current results:](https://docs.google.com/spreadsheets/d/1ufKyR-Zs-IGXwvqPgftssmTlceVjiQX364sbrjr2QU8/edit#gid=1192415584) +20% total detect, +8% total decode in OpenCV [QR benchmark](https://github.com/opencv/opencv_benchmarks/tree/develop/python_benchmarks/qr_codes) 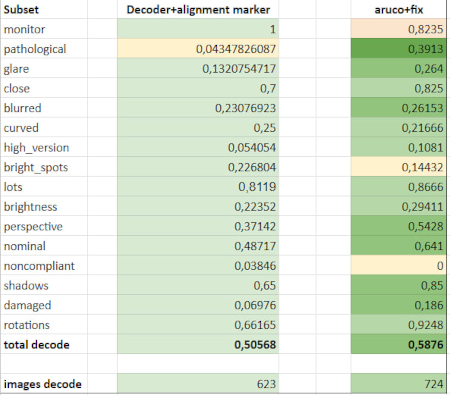 78.4% detect, 58.7% decode vs 58.5 detect, 50.5% decode in default [main.py.txt](https://github.com/opencv/opencv/files/10762369/main.py.txt) 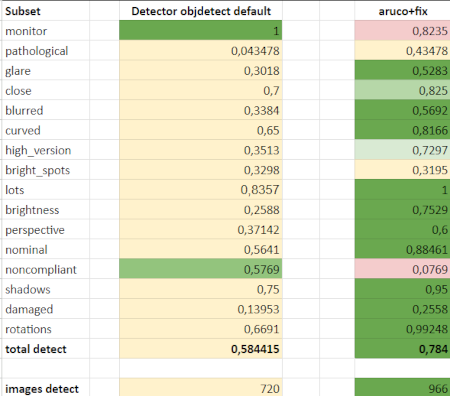 add new info to [google docs](https://docs.google.com/spreadsheets/d/1ufKyR-Zs-IGXwvqPgftssmTlceVjiQX364sbrjr2QU8/edit?usp=sharing) ### Pull Request Readiness Checklist See details at https://github.com/opencv/opencv/wiki/How_to_contribute#making-a-good-pull-request - [x] I agree to contribute to the project under Apache 2 License. - [x] To the best of my knowledge, the proposed patch is not based on a code under GPL or another license that is incompatible with OpenCV - [x] The PR is proposed to the proper branch - [x] There is a reference to the original bug report and related work - [ ] There is accuracy test, performance test and test data in opencv_extra repository, if applicable Patch to opencv_extra has the same branch name. - [ ] The feature is well documented and sample code can be built with the project CMake
{kind=link}
{kind=link}
This commit is contained in:
parent
5330112f05
commit
9fa014edcd
@ -45,6 +45,7 @@
|
||||
#define OPENCV_OBJDETECT_HPP
|
||||
|
||||
#include "opencv2/core.hpp"
|
||||
#include "opencv2/objdetect/aruco_detector.hpp"
|
||||
|
||||
/**
|
||||
@defgroup objdetect Object Detection
|
||||
@ -763,28 +764,15 @@ public:
|
||||
|
||||
};
|
||||
|
||||
class CV_EXPORTS_W QRCodeDetector
|
||||
{
|
||||
class CV_EXPORTS_W_SIMPLE QRCodeDetectorBase {
|
||||
public:
|
||||
CV_WRAP QRCodeDetector();
|
||||
~QRCodeDetector();
|
||||
CV_DEPRECATED_EXTERNAL // avoid using in C++ code, will be moved to "protected" (need to fix bindings first)
|
||||
QRCodeDetectorBase();
|
||||
|
||||
/** @brief sets the epsilon used during the horizontal scan of QR code stop marker detection.
|
||||
@param epsX Epsilon neighborhood, which allows you to determine the horizontal pattern
|
||||
of the scheme 1:1:3:1:1 according to QR code standard.
|
||||
*/
|
||||
CV_WRAP void setEpsX(double epsX);
|
||||
/** @brief sets the epsilon used during the vertical scan of QR code stop marker detection.
|
||||
@param epsY Epsilon neighborhood, which allows you to determine the vertical pattern
|
||||
of the scheme 1:1:3:1:1 according to QR code standard.
|
||||
*/
|
||||
CV_WRAP void setEpsY(double epsY);
|
||||
|
||||
/** @brief use markers to improve the position of the corners of the QR code
|
||||
*
|
||||
* alignmentMarkers using by default
|
||||
*/
|
||||
CV_WRAP void setUseAlignmentMarkers(bool useAlignmentMarkers);
|
||||
QRCodeDetectorBase(const QRCodeDetectorBase&) = default;
|
||||
QRCodeDetectorBase(QRCodeDetectorBase&&) = default;
|
||||
QRCodeDetectorBase& operator=(const QRCodeDetectorBase&) = default;
|
||||
QRCodeDetectorBase& operator=(QRCodeDetectorBase&&) = default;
|
||||
|
||||
/** @brief Detects QR code in image and returns the quadrangle containing the code.
|
||||
@param img grayscale or color (BGR) image containing (or not) QR code.
|
||||
@ -799,16 +787,7 @@ public:
|
||||
@param points Quadrangle vertices found by detect() method (or some other algorithm).
|
||||
@param straight_qrcode The optional output image containing rectified and binarized QR code
|
||||
*/
|
||||
CV_WRAP std::string decode(InputArray img, InputArray points, OutputArray straight_qrcode = noArray());
|
||||
|
||||
/** @brief Decodes QR code on a curved surface in image once it's found by the detect() method.
|
||||
|
||||
Returns UTF8-encoded output string or empty string if the code cannot be decoded.
|
||||
@param img grayscale or color (BGR) image containing QR code.
|
||||
@param points Quadrangle vertices found by detect() method (or some other algorithm).
|
||||
@param straight_qrcode The optional output image containing rectified and binarized QR code
|
||||
*/
|
||||
CV_WRAP cv::String decodeCurved(InputArray img, InputArray points, OutputArray straight_qrcode = noArray());
|
||||
CV_WRAP std::string decode(InputArray img, InputArray points, OutputArray straight_qrcode = noArray()) const;
|
||||
|
||||
/** @brief Both detects and decodes QR code
|
||||
|
||||
@ -817,16 +796,8 @@ public:
|
||||
@param straight_qrcode The optional output image containing rectified and binarized QR code
|
||||
*/
|
||||
CV_WRAP std::string detectAndDecode(InputArray img, OutputArray points=noArray(),
|
||||
OutputArray straight_qrcode = noArray());
|
||||
OutputArray straight_qrcode = noArray()) const;
|
||||
|
||||
/** @brief Both detects and decodes QR code on a curved surface
|
||||
|
||||
@param img grayscale or color (BGR) image containing QR code.
|
||||
@param points optional output array of vertices of the found QR code quadrangle. Will be empty if not found.
|
||||
@param straight_qrcode The optional output image containing rectified and binarized QR code
|
||||
*/
|
||||
CV_WRAP std::string detectAndDecodeCurved(InputArray img, OutputArray points=noArray(),
|
||||
OutputArray straight_qrcode = noArray());
|
||||
|
||||
/** @brief Detects QR codes in image and returns the vector of the quadrangles containing the codes.
|
||||
@param img grayscale or color (BGR) image containing (or not) QR codes.
|
||||
@ -860,18 +831,109 @@ public:
|
||||
OutputArray points = noArray(),
|
||||
OutputArrayOfArrays straight_qrcode = noArray()
|
||||
) const;
|
||||
|
||||
protected:
|
||||
struct Impl;
|
||||
protected:
|
||||
Ptr<Impl> p;
|
||||
};
|
||||
|
||||
class CV_EXPORTS_W_SIMPLE QRCodeDetector : public QRCodeDetectorBase
|
||||
{
|
||||
public:
|
||||
CV_WRAP QRCodeDetector();
|
||||
|
||||
/** @brief sets the epsilon used during the horizontal scan of QR code stop marker detection.
|
||||
@param epsX Epsilon neighborhood, which allows you to determine the horizontal pattern
|
||||
of the scheme 1:1:3:1:1 according to QR code standard.
|
||||
*/
|
||||
CV_WRAP QRCodeDetector& setEpsX(double epsX);
|
||||
/** @brief sets the epsilon used during the vertical scan of QR code stop marker detection.
|
||||
@param epsY Epsilon neighborhood, which allows you to determine the vertical pattern
|
||||
of the scheme 1:1:3:1:1 according to QR code standard.
|
||||
*/
|
||||
CV_WRAP QRCodeDetector& setEpsY(double epsY);
|
||||
|
||||
/** @brief use markers to improve the position of the corners of the QR code
|
||||
*
|
||||
* alignmentMarkers using by default
|
||||
*/
|
||||
CV_WRAP QRCodeDetector& setUseAlignmentMarkers(bool useAlignmentMarkers);
|
||||
|
||||
/** @brief Decodes QR code on a curved surface in image once it's found by the detect() method.
|
||||
|
||||
Returns UTF8-encoded output string or empty string if the code cannot be decoded.
|
||||
@param img grayscale or color (BGR) image containing QR code.
|
||||
@param points Quadrangle vertices found by detect() method (or some other algorithm).
|
||||
@param straight_qrcode The optional output image containing rectified and binarized QR code
|
||||
*/
|
||||
CV_WRAP cv::String decodeCurved(InputArray img, InputArray points, OutputArray straight_qrcode = noArray());
|
||||
|
||||
/** @brief Both detects and decodes QR code on a curved surface
|
||||
|
||||
@param img grayscale or color (BGR) image containing QR code.
|
||||
@param points optional output array of vertices of the found QR code quadrangle. Will be empty if not found.
|
||||
@param straight_qrcode The optional output image containing rectified and binarized QR code
|
||||
*/
|
||||
CV_WRAP std::string detectAndDecodeCurved(InputArray img, OutputArray points=noArray(),
|
||||
OutputArray straight_qrcode = noArray());
|
||||
};
|
||||
|
||||
class CV_EXPORTS_W_SIMPLE QRCodeDetectorAruco : public QRCodeDetectorBase {
|
||||
public:
|
||||
CV_WRAP QRCodeDetectorAruco();
|
||||
|
||||
struct CV_EXPORTS_W_SIMPLE Params {
|
||||
CV_WRAP Params();
|
||||
|
||||
/** @brief The minimum allowed pixel size of a QR module in the smallest image in the image pyramid, default 4.f */
|
||||
CV_PROP_RW float minModuleSizeInPyramid;
|
||||
|
||||
/** @brief The maximum allowed relative rotation for finder patterns in the same QR code, default pi/12 */
|
||||
CV_PROP_RW float maxRotation;
|
||||
|
||||
/** @brief The maximum allowed relative mismatch in module sizes for finder patterns in the same QR code, default 1.75f */
|
||||
CV_PROP_RW float maxModuleSizeMismatch;
|
||||
|
||||
/** @brief The maximum allowed module relative mismatch for timing pattern module, default 2.f
|
||||
*
|
||||
* If relative mismatch of timing pattern module more this value, penalty points will be added.
|
||||
* If a lot of penalty points are added, QR code will be rejected. */
|
||||
CV_PROP_RW float maxTimingPatternMismatch;
|
||||
|
||||
/** @brief The maximum allowed percentage of penalty points out of total pins in timing pattern, default 0.4f */
|
||||
CV_PROP_RW float maxPenalties;
|
||||
|
||||
/** @brief The maximum allowed relative color mismatch in the timing pattern, default 0.2f*/
|
||||
CV_PROP_RW float maxColorsMismatch;
|
||||
|
||||
/** @brief The algorithm find QR codes with almost minimum timing pattern score and minimum size, default 0.9f
|
||||
*
|
||||
* The QR code with the minimum "timing pattern score" and minimum "size" is selected as the best QR code.
|
||||
* If for the current QR code "timing pattern score" * scaleTimingPatternScore < "previous timing pattern score" and "size" < "previous size", then
|
||||
* current QR code set as the best QR code. */
|
||||
CV_PROP_RW float scaleTimingPatternScore;
|
||||
};
|
||||
|
||||
/** @brief QR code detector constructor for Aruco-based algorithm. See cv::QRCodeDetectorAruco::Params */
|
||||
CV_WRAP explicit QRCodeDetectorAruco(const QRCodeDetectorAruco::Params& params);
|
||||
|
||||
/** @brief Detector parameters getter. See cv::QRCodeDetectorAruco::Params */
|
||||
CV_WRAP const QRCodeDetectorAruco::Params& getDetectorParameters() const;
|
||||
|
||||
/** @brief Detector parameters setter. See cv::QRCodeDetectorAruco::Params */
|
||||
CV_WRAP QRCodeDetectorAruco& setDetectorParameters(const QRCodeDetectorAruco::Params& params);
|
||||
|
||||
/** @brief Aruco detector parameters are used to search for the finder patterns. */
|
||||
CV_WRAP aruco::DetectorParameters getArucoParameters();
|
||||
|
||||
/** @brief Aruco detector parameters are used to search for the finder patterns. */
|
||||
CV_WRAP void setArucoParameters(const aruco::DetectorParameters& params);
|
||||
};
|
||||
|
||||
//! @}
|
||||
}
|
||||
|
||||
#include "opencv2/objdetect/detection_based_tracker.hpp"
|
||||
#include "opencv2/objdetect/face.hpp"
|
||||
#include "opencv2/objdetect/aruco_detector.hpp"
|
||||
#include "opencv2/objdetect/charuco_detector.hpp"
|
||||
|
||||
#endif
|
||||
|
||||
7
modules/objdetect/misc/objc/gen_dict.json
Normal file
7
modules/objdetect/misc/objc/gen_dict.json
Normal file
@ -0,0 +1,7 @@
|
||||
{
|
||||
"ManualFuncs" : {
|
||||
"QRCodeDetectorAruco": {
|
||||
"getDetectorParameters": { "declaration" : [""], "implementation" : [""] }
|
||||
}
|
||||
}
|
||||
}
|
||||
@ -3,6 +3,7 @@
|
||||
// of this distribution and at http://opencv.org/license.html.
|
||||
|
||||
#include "perf_precomp.hpp"
|
||||
#include "../test/test_qr_utils.hpp"
|
||||
|
||||
namespace opencv_test
|
||||
{
|
||||
@ -23,7 +24,9 @@ PERF_TEST_P_(Perf_Objdetect_QRCode, detect)
|
||||
std::vector< Point > corners;
|
||||
QRCodeDetector qrcode;
|
||||
TEST_CYCLE() ASSERT_TRUE(qrcode.detect(src, corners));
|
||||
SANITY_CHECK(corners);
|
||||
const int pixels_error = 3;
|
||||
check_qr(root, name_current_image, "test_images", corners, {}, pixels_error);
|
||||
SANITY_CHECK_NOTHING();
|
||||
}
|
||||
|
||||
#ifdef HAVE_QUIRC
|
||||
@ -45,48 +48,52 @@ PERF_TEST_P_(Perf_Objdetect_QRCode, decode)
|
||||
decoded_info = qrcode.decode(src, corners, straight_barcode);
|
||||
ASSERT_FALSE(decoded_info.empty());
|
||||
}
|
||||
|
||||
std::vector<uint8_t> decoded_info_uint8_t(decoded_info.begin(), decoded_info.end());
|
||||
SANITY_CHECK(decoded_info_uint8_t);
|
||||
SANITY_CHECK(straight_barcode);
|
||||
|
||||
const int pixels_error = 3;
|
||||
check_qr(root, name_current_image, "test_images", corners, {decoded_info}, pixels_error);
|
||||
SANITY_CHECK_NOTHING();
|
||||
}
|
||||
#endif
|
||||
|
||||
typedef ::perf::TestBaseWithParam< std::string > Perf_Objdetect_QRCode_Multi;
|
||||
typedef ::perf::TestBaseWithParam<std::tuple<std::string, std::string>> Perf_Objdetect_QRCode_Multi;
|
||||
|
||||
static inline bool compareCorners(const Point2f& corner1, const Point2f& corner2) {
|
||||
return corner1.x == corner2.x ? corner1.y < corner2.y : corner1.x < corner2.x;
|
||||
}
|
||||
static std::set<std::pair<std::string, std::string>> disabled_samples = {{"5_qrcodes.png", "aruco_based"}};
|
||||
|
||||
PERF_TEST_P_(Perf_Objdetect_QRCode_Multi, detectMulti)
|
||||
{
|
||||
const std::string name_current_image = GetParam();
|
||||
const std::string name_current_image = get<0>(GetParam());
|
||||
const std::string method = get<1>(GetParam());
|
||||
const std::string root = "cv/qrcode/multiple/";
|
||||
|
||||
std::string image_path = findDataFile(root + name_current_image);
|
||||
Mat src = imread(image_path);
|
||||
ASSERT_FALSE(src.empty()) << "Can't read image: " << image_path;
|
||||
std::vector<Point2f> corners;
|
||||
QRCodeDetector qrcode;
|
||||
std::vector<Point> corners;
|
||||
QRCodeDetectorBase qrcode = QRCodeDetector();
|
||||
if (method == "aruco_based") {
|
||||
qrcode = QRCodeDetectorAruco();
|
||||
}
|
||||
TEST_CYCLE() ASSERT_TRUE(qrcode.detectMulti(src, corners));
|
||||
sort(corners.begin(), corners.end(), compareCorners);
|
||||
SANITY_CHECK(corners);
|
||||
}
|
||||
|
||||
static inline bool compareQR(const pair<string, Mat>& v1, const pair<string, Mat>& v2) {
|
||||
return v1.first < v2.first;
|
||||
const int pixels_error = 7;
|
||||
check_qr(root, name_current_image, "multiple_images", corners, {}, pixels_error, true);
|
||||
SANITY_CHECK_NOTHING();
|
||||
}
|
||||
|
||||
#ifdef HAVE_QUIRC
|
||||
PERF_TEST_P_(Perf_Objdetect_QRCode_Multi, decodeMulti)
|
||||
{
|
||||
const std::string name_current_image = GetParam();
|
||||
const std::string name_current_image = get<0>(GetParam());
|
||||
std::string method = get<1>(GetParam());
|
||||
const std::string root = "cv/qrcode/multiple/";
|
||||
std::string image_path = findDataFile(root + name_current_image);
|
||||
Mat src = imread(image_path);
|
||||
ASSERT_FALSE(src.empty()) << "Can't read image: " << image_path;
|
||||
QRCodeDetector qrcode;
|
||||
if (disabled_samples.find({name_current_image, method}) != disabled_samples.end()) {
|
||||
throw SkipTestException(name_current_image + " is disabled sample for method " + method);
|
||||
}
|
||||
QRCodeDetectorBase qrcode = QRCodeDetector();
|
||||
if (method == "aruco_based") {
|
||||
qrcode = QRCodeDetectorAruco();
|
||||
}
|
||||
std::vector<Point2f> corners;
|
||||
ASSERT_TRUE(qrcode.detectMulti(src, corners));
|
||||
std::vector<Mat> straight_barcode;
|
||||
@ -94,26 +101,20 @@ PERF_TEST_P_(Perf_Objdetect_QRCode_Multi, decodeMulti)
|
||||
TEST_CYCLE()
|
||||
{
|
||||
ASSERT_TRUE(qrcode.decodeMulti(src, corners, decoded_info, straight_barcode));
|
||||
for(size_t i = 0; i < decoded_info.size(); i++)
|
||||
{
|
||||
ASSERT_FALSE(decoded_info[i].empty());
|
||||
}
|
||||
}
|
||||
ASSERT_TRUE(decoded_info.size() > 0ull);
|
||||
for(size_t i = 0; i < decoded_info.size(); i++) {
|
||||
ASSERT_FALSE(decoded_info[i].empty());
|
||||
}
|
||||
ASSERT_EQ(decoded_info.size(), straight_barcode.size());
|
||||
vector<pair<string, Mat> > result;
|
||||
for (size_t i = 0ull; i < decoded_info.size(); i++) {
|
||||
result.push_back(make_pair(decoded_info[i], straight_barcode[i]));
|
||||
vector<Point> corners_result(corners.size());
|
||||
for (size_t i = 0ull; i < corners_result.size(); i++) {
|
||||
corners_result[i] = corners[i];
|
||||
}
|
||||
|
||||
sort(result.begin(), result.end(), compareQR);
|
||||
vector<vector<uint8_t> > decoded_info_sort;
|
||||
vector<Mat> straight_barcode_sort;
|
||||
for (size_t i = 0ull; i < result.size(); i++) {
|
||||
vector<uint8_t> tmp(result[i].first.begin(), result[i].first.end());
|
||||
decoded_info_sort.push_back(tmp);
|
||||
straight_barcode_sort.push_back(result[i].second);
|
||||
}
|
||||
SANITY_CHECK(decoded_info_sort);
|
||||
const int pixels_error = 7;
|
||||
check_qr(root, name_current_image, "multiple_images", corners_result, decoded_info, pixels_error, true);
|
||||
SANITY_CHECK_NOTHING();
|
||||
}
|
||||
#endif
|
||||
|
||||
@ -127,11 +128,10 @@ INSTANTIATE_TEST_CASE_P(/*nothing*/, Perf_Objdetect_QRCode,
|
||||
// version_5_right.jpg DISABLED after tile fix, PR #22025
|
||||
|
||||
INSTANTIATE_TEST_CASE_P(/*nothing*/, Perf_Objdetect_QRCode_Multi,
|
||||
::testing::Values(
|
||||
"2_qrcodes.png", "3_close_qrcodes.png", "3_qrcodes.png", "4_qrcodes.png",
|
||||
"5_qrcodes.png", "6_qrcodes.png", "7_qrcodes.png", "8_close_qrcodes.png"
|
||||
)
|
||||
);
|
||||
testing::Combine(testing::Values("2_qrcodes.png", "3_close_qrcodes.png", "3_qrcodes.png", "4_qrcodes.png",
|
||||
"5_qrcodes.png", "6_qrcodes.png", "7_qrcodes.png", "8_close_qrcodes.png"),
|
||||
testing::Values("contours_based", "aruco_based")));
|
||||
|
||||
|
||||
typedef ::perf::TestBaseWithParam< tuple< std::string, Size > > Perf_Objdetect_Not_QRCode;
|
||||
|
||||
|
||||
@ -950,34 +950,99 @@ vector<Point2f> QRDetect::getQuadrilateral(vector<Point2f> angle_list)
|
||||
return result_angle_list;
|
||||
}
|
||||
|
||||
|
||||
struct QRCodeDetector::Impl
|
||||
{
|
||||
public:
|
||||
Impl() { epsX = 0.2; epsY = 0.1; }
|
||||
~Impl() {}
|
||||
|
||||
double epsX, epsY;
|
||||
vector<vector<Point2f>> alignmentMarkers;
|
||||
vector<Point2f> updateQrCorners;
|
||||
bool useAlignmentMarkers = true;
|
||||
struct QRCodeDetectorBase::Impl {
|
||||
virtual ~Impl() {}
|
||||
virtual bool detect(InputArray img, OutputArray points) const = 0;
|
||||
virtual std::string decode(InputArray img, InputArray points, OutputArray straight_qrcode) const = 0;
|
||||
virtual std::string detectAndDecode(InputArray img, OutputArray points, OutputArray straight_qrcode) const = 0;
|
||||
virtual bool detectMulti(InputArray img, OutputArray points) const = 0;
|
||||
virtual bool decodeMulti(InputArray img, InputArray points, std::vector<std::string>& decoded_info,
|
||||
OutputArrayOfArrays straight_qrcode) const = 0;
|
||||
virtual bool detectAndDecodeMulti(InputArray img, std::vector<std::string>& decoded_info, OutputArray points,
|
||||
OutputArrayOfArrays straight_qrcode) const = 0;
|
||||
};
|
||||
|
||||
QRCodeDetector::QRCodeDetector() : p(new Impl) {}
|
||||
QRCodeDetectorBase::QRCodeDetectorBase() {}
|
||||
|
||||
QRCodeDetector::~QRCodeDetector() {}
|
||||
bool QRCodeDetectorBase::detect(InputArray img, OutputArray points) const {
|
||||
CV_Assert(p);
|
||||
return p->detect(img, points);
|
||||
}
|
||||
|
||||
void QRCodeDetector::setEpsX(double epsX) { p->epsX = epsX; }
|
||||
void QRCodeDetector::setEpsY(double epsY) { p->epsY = epsY; }
|
||||
std::string QRCodeDetectorBase::decode(InputArray img, InputArray points, OutputArray straight_qrcode) const {
|
||||
CV_Assert(p);
|
||||
return p->decode(img, points, straight_qrcode);
|
||||
}
|
||||
|
||||
bool QRCodeDetector::detect(InputArray in, OutputArray points) const
|
||||
std::string QRCodeDetectorBase::detectAndDecode(InputArray img, OutputArray points, OutputArray straight_qrcode) const {
|
||||
CV_Assert(p);
|
||||
return p->detectAndDecode(img, points, straight_qrcode);
|
||||
}
|
||||
|
||||
bool QRCodeDetectorBase::detectMulti(InputArray img, OutputArray points) const {
|
||||
CV_Assert(p);
|
||||
return p->detectMulti(img, points);
|
||||
}
|
||||
|
||||
bool QRCodeDetectorBase::decodeMulti(InputArray img, InputArray points, std::vector<std::string>& decoded_info,
|
||||
OutputArrayOfArrays straight_qrcode) const {
|
||||
CV_Assert(p);
|
||||
return p->decodeMulti(img, points, decoded_info, straight_qrcode);
|
||||
}
|
||||
|
||||
bool QRCodeDetectorBase::detectAndDecodeMulti(InputArray img, std::vector<std::string>& decoded_info,
|
||||
OutputArray points, OutputArrayOfArrays straight_qrcode) const {
|
||||
CV_Assert(p);
|
||||
return p->detectAndDecodeMulti(img, decoded_info, points, straight_qrcode);
|
||||
}
|
||||
|
||||
struct ImplContour : public QRCodeDetectorBase::Impl
|
||||
{
|
||||
public:
|
||||
ImplContour(): epsX(0.2), epsY(0.1) {}
|
||||
|
||||
double epsX, epsY;
|
||||
mutable vector<vector<Point2f>> alignmentMarkers;
|
||||
mutable vector<Point2f> updateQrCorners;
|
||||
bool useAlignmentMarkers = true;
|
||||
|
||||
bool detect(InputArray in, OutputArray points) const override;
|
||||
std::string decode(InputArray img, InputArray points, OutputArray straight_qrcode) const override;
|
||||
std::string detectAndDecode(InputArray img, OutputArray points, OutputArray straight_qrcode) const override;
|
||||
|
||||
bool detectMulti(InputArray img, OutputArray points) const override;
|
||||
bool decodeMulti(InputArray img, InputArray points, std::vector<cv::String>& decoded_info,
|
||||
OutputArrayOfArrays straight_qrcode) const override;
|
||||
bool detectAndDecodeMulti(InputArray img, std::vector<cv::String>& decoded_info, OutputArray points,
|
||||
OutputArrayOfArrays straight_qrcode) const override;
|
||||
|
||||
String decodeCurved(InputArray in, InputArray points, OutputArray straight_qrcode);
|
||||
|
||||
std::string detectAndDecodeCurved(InputArray in, OutputArray points, OutputArray straight_qrcode);
|
||||
};
|
||||
|
||||
QRCodeDetector::QRCodeDetector() {
|
||||
p = makePtr<ImplContour>();
|
||||
}
|
||||
|
||||
QRCodeDetector& QRCodeDetector::setEpsX(double epsX) {
|
||||
std::dynamic_pointer_cast<ImplContour>(p)->epsX = epsX;
|
||||
return *this;
|
||||
}
|
||||
|
||||
QRCodeDetector& QRCodeDetector::setEpsY(double epsY) {
|
||||
std::dynamic_pointer_cast<ImplContour>(p)->epsY = epsY;
|
||||
return *this;
|
||||
}
|
||||
|
||||
bool ImplContour::detect(InputArray in, OutputArray points) const
|
||||
{
|
||||
Mat inarr;
|
||||
if (!checkQRInputImage(in, inarr))
|
||||
return false;
|
||||
|
||||
QRDetect qrdet;
|
||||
qrdet.init(inarr, p->epsX, p->epsY);
|
||||
qrdet.init(inarr, epsX, epsY);
|
||||
if (!qrdet.localization()) { return false; }
|
||||
if (!qrdet.computeTransformationPoints()) { return false; }
|
||||
vector<Point2f> pnts2f = qrdet.getTransformationPoints();
|
||||
@ -2789,9 +2854,7 @@ QRDecode::QRDecode(bool _useAlignmentMarkers):
|
||||
test_perspective_size(0.f)
|
||||
{}
|
||||
|
||||
std::string QRCodeDetector::decode(InputArray in, InputArray points,
|
||||
OutputArray straight_qrcode)
|
||||
{
|
||||
std::string ImplContour::decode(InputArray in, InputArray points, OutputArray straight_qrcode) const {
|
||||
Mat inarr;
|
||||
if (!checkQRInputImage(in, inarr))
|
||||
return std::string();
|
||||
@ -2801,7 +2864,7 @@ std::string QRCodeDetector::decode(InputArray in, InputArray points,
|
||||
CV_Assert(src_points.size() == 4);
|
||||
CV_CheckGT(contourArea(src_points), 0.0, "Invalid QR code source points");
|
||||
|
||||
QRDecode qrdec(p->useAlignmentMarkers);
|
||||
QRDecode qrdec(useAlignmentMarkers);
|
||||
qrdec.init(inarr, src_points);
|
||||
bool ok = qrdec.straightDecodingProcess();
|
||||
|
||||
@ -2815,14 +2878,18 @@ std::string QRCodeDetector::decode(InputArray in, InputArray points,
|
||||
qrdec.getStraightBarcode().convertTo(straight_qrcode, CV_8UC1);
|
||||
}
|
||||
if (ok && !decoded_info.empty()) {
|
||||
p->alignmentMarkers = {qrdec.alignment_coords};
|
||||
p->updateQrCorners = qrdec.getOriginalPoints();
|
||||
alignmentMarkers = {qrdec.alignment_coords};
|
||||
updateQrCorners = qrdec.getOriginalPoints();
|
||||
}
|
||||
return ok ? decoded_info : std::string();
|
||||
}
|
||||
|
||||
cv::String QRCodeDetector::decodeCurved(InputArray in, InputArray points,
|
||||
OutputArray straight_qrcode)
|
||||
String QRCodeDetector::decodeCurved(InputArray in, InputArray points, OutputArray straight_qrcode) {
|
||||
CV_Assert(p);
|
||||
return std::dynamic_pointer_cast<ImplContour>(p)->decodeCurved(in, points, straight_qrcode);
|
||||
}
|
||||
|
||||
String ImplContour::decodeCurved(InputArray in, InputArray points, OutputArray straight_qrcode)
|
||||
{
|
||||
Mat inarr;
|
||||
if (!checkQRInputImage(in, inarr))
|
||||
@ -2833,7 +2900,7 @@ cv::String QRCodeDetector::decodeCurved(InputArray in, InputArray points,
|
||||
CV_Assert(src_points.size() == 4);
|
||||
CV_CheckGT(contourArea(src_points), 0.0, "Invalid QR code source points");
|
||||
|
||||
QRDecode qrdec(p->useAlignmentMarkers);
|
||||
QRDecode qrdec(useAlignmentMarkers);
|
||||
qrdec.init(inarr, src_points);
|
||||
bool ok = qrdec.curvedDecodingProcess();
|
||||
|
||||
@ -2851,10 +2918,7 @@ cv::String QRCodeDetector::decodeCurved(InputArray in, InputArray points,
|
||||
return ok ? decoded_info : std::string();
|
||||
}
|
||||
|
||||
std::string QRCodeDetector::detectAndDecode(InputArray in,
|
||||
OutputArray points_,
|
||||
OutputArray straight_qrcode)
|
||||
{
|
||||
std::string ImplContour::detectAndDecode(InputArray in, OutputArray points_, OutputArray straight_qrcode) const {
|
||||
Mat inarr;
|
||||
if (!checkQRInputImage(in, inarr))
|
||||
{
|
||||
@ -2874,9 +2938,14 @@ std::string QRCodeDetector::detectAndDecode(InputArray in,
|
||||
return decoded_info;
|
||||
}
|
||||
|
||||
std::string QRCodeDetector::detectAndDecodeCurved(InputArray in,
|
||||
OutputArray points_,
|
||||
OutputArray straight_qrcode)
|
||||
std::string QRCodeDetector::detectAndDecodeCurved(InputArray in, OutputArray points,
|
||||
OutputArray straight_qrcode) {
|
||||
CV_Assert(p);
|
||||
return std::dynamic_pointer_cast<ImplContour>(p)->detectAndDecodeCurved(in, points, straight_qrcode);
|
||||
}
|
||||
|
||||
std::string ImplContour::detectAndDecodeCurved(InputArray in, OutputArray points_,
|
||||
OutputArray straight_qrcode)
|
||||
{
|
||||
Mat inarr;
|
||||
if (!checkQRInputImage(in, inarr))
|
||||
@ -3817,31 +3886,28 @@ bool QRDetectMulti::computeTransformationPoints(const size_t cur_ind)
|
||||
return true;
|
||||
}
|
||||
|
||||
bool QRCodeDetector::detectMulti(InputArray in, OutputArray points) const
|
||||
{
|
||||
Mat inarr;
|
||||
if (!checkQRInputImage(in, inarr))
|
||||
{
|
||||
bool ImplContour::detectMulti(InputArray in, OutputArray points) const {
|
||||
Mat gray;
|
||||
if (!checkQRInputImage(in, gray)) {
|
||||
points.release();
|
||||
return false;
|
||||
}
|
||||
|
||||
vector<Point2f> result;
|
||||
QRDetectMulti qrdet;
|
||||
qrdet.init(inarr, p->epsX, p->epsY);
|
||||
if (!qrdet.localization())
|
||||
{
|
||||
qrdet.init(gray, epsX, epsY);
|
||||
if (!qrdet.localization()) {
|
||||
points.release();
|
||||
return false;
|
||||
}
|
||||
vector< vector< Point2f > > pnts2f = qrdet.getTransformationPoints();
|
||||
vector<Point2f> trans_points;
|
||||
vector<vector<Point2f> > pnts2f = qrdet.getTransformationPoints();
|
||||
for(size_t i = 0; i < pnts2f.size(); i++)
|
||||
for(size_t j = 0; j < pnts2f[i].size(); j++)
|
||||
trans_points.push_back(pnts2f[i][j]);
|
||||
|
||||
updatePointsResult(points, trans_points);
|
||||
|
||||
return true;
|
||||
result.push_back(pnts2f[i][j]);
|
||||
if (result.size() >= 4) {
|
||||
updatePointsResult(points, result);
|
||||
return true;
|
||||
}
|
||||
return false;
|
||||
}
|
||||
|
||||
class ParallelDecodeProcess : public ParallelLoopBody
|
||||
@ -3902,7 +3968,7 @@ private:
|
||||
|
||||
};
|
||||
|
||||
bool QRCodeDetector::decodeMulti(
|
||||
bool ImplContour::decodeMulti(
|
||||
InputArray img,
|
||||
InputArray points,
|
||||
CV_OUT std::vector<cv::String>& decoded_info,
|
||||
@ -3926,7 +3992,7 @@ bool QRCodeDetector::decodeMulti(
|
||||
}
|
||||
}
|
||||
CV_Assert(src_points.size() > 0);
|
||||
vector<QRDecode> qrdec(src_points.size(), p->useAlignmentMarkers);
|
||||
vector<QRDecode> qrdec(src_points.size(), useAlignmentMarkers);
|
||||
vector<Mat> straight_barcode(src_points.size());
|
||||
vector<std::string> info(src_points.size());
|
||||
ParallelDecodeProcess parallelDecodeProcess(inarr, qrdec, info, straight_barcode, src_points);
|
||||
@ -3957,12 +4023,12 @@ bool QRCodeDetector::decodeMulti(
|
||||
{
|
||||
decoded_info.push_back(info[i]);
|
||||
}
|
||||
p->alignmentMarkers.resize(src_points.size());
|
||||
p->updateQrCorners.resize(src_points.size()*4ull);
|
||||
alignmentMarkers.resize(src_points.size());
|
||||
updateQrCorners.resize(src_points.size()*4ull);
|
||||
for (size_t i = 0ull; i < src_points.size(); i++) {
|
||||
p->alignmentMarkers[i] = qrdec[i].alignment_coords;
|
||||
alignmentMarkers[i] = qrdec[i].alignment_coords;
|
||||
for (size_t j = 0ull; j < 4ull; j++)
|
||||
p->updateQrCorners[i*4ull+j] = qrdec[i].getOriginalPoints()[j] * qrdec[i].coeff_expansion;
|
||||
updateQrCorners[i*4ull+j] = qrdec[i].getOriginalPoints()[j] * qrdec[i].coeff_expansion;
|
||||
}
|
||||
if (!decoded_info.empty())
|
||||
return true;
|
||||
@ -3970,7 +4036,7 @@ bool QRCodeDetector::decodeMulti(
|
||||
return false;
|
||||
}
|
||||
|
||||
bool QRCodeDetector::detectAndDecodeMulti(
|
||||
bool ImplContour::detectAndDecodeMulti(
|
||||
InputArray img,
|
||||
CV_OUT std::vector<cv::String>& decoded_info,
|
||||
OutputArray points_,
|
||||
@ -3994,13 +4060,537 @@ bool QRCodeDetector::detectAndDecodeMulti(
|
||||
updatePointsResult(points_, points);
|
||||
decoded_info.clear();
|
||||
ok = decodeMulti(inarr, points, decoded_info, straight_qrcode);
|
||||
updatePointsResult(points_, p->updateQrCorners);
|
||||
updatePointsResult(points_, updateQrCorners);
|
||||
return ok;
|
||||
}
|
||||
|
||||
void QRCodeDetector::setUseAlignmentMarkers(bool useAlignmentMarkers) {
|
||||
p->useAlignmentMarkers = useAlignmentMarkers;
|
||||
QRCodeDetector& QRCodeDetector::setUseAlignmentMarkers(bool useAlignmentMarkers) {
|
||||
(std::dynamic_pointer_cast<ImplContour>)(p)->useAlignmentMarkers = useAlignmentMarkers;
|
||||
return *this;
|
||||
}
|
||||
|
||||
QRCodeDetectorAruco::Params::Params() {
|
||||
minModuleSizeInPyramid = 4.f;
|
||||
maxRotation = (float)CV_PI/12.f;
|
||||
maxModuleSizeMismatch = 1.75f;
|
||||
maxTimingPatternMismatch = 2.f;
|
||||
maxPenalties = 0.4f;
|
||||
maxColorsMismatch = 0.2f;
|
||||
scaleTimingPatternScore = 0.9f;
|
||||
}
|
||||
|
||||
namespace {
|
||||
|
||||
struct FinderPatternInfo {
|
||||
FinderPatternInfo() {}
|
||||
|
||||
FinderPatternInfo(const vector<Point2f>& patternPoints): points(patternPoints) {
|
||||
float minSin = 1.f;
|
||||
for (int i = 0; i < 4; i++) {
|
||||
center += points[i];
|
||||
const Point2f side = points[i]-points[(i+1) % 4];
|
||||
const float lenSide = sqrt(normL2Sqr<float>(side));
|
||||
minSin = min(minSin, abs(side.y) / lenSide);
|
||||
moduleSize += lenSide;
|
||||
}
|
||||
moduleSize /= (4.f * 7.f); // 4 sides, 7 modules in one side
|
||||
center /= 4.f;
|
||||
minQrAngle = asin(minSin);
|
||||
}
|
||||
|
||||
enum TypePattern {
|
||||
CENTER,
|
||||
RIGHT,
|
||||
BOTTOM,
|
||||
NONE
|
||||
};
|
||||
|
||||
void setType(const TypePattern& _typePattern, const Point2f& centerQR) {
|
||||
typePattern = _typePattern;
|
||||
float bestLen = normL2Sqr<float>(centerQR - points[0]);
|
||||
int id = 0;
|
||||
for (int i = 1; i < 4; i++) {
|
||||
float len = normL2Sqr<float>(centerQR - points[i]);
|
||||
if (len < bestLen) {
|
||||
bestLen = len;
|
||||
id = i;
|
||||
}
|
||||
}
|
||||
innerCornerId = id;
|
||||
}
|
||||
|
||||
Point2f getDirectionTo(const TypePattern& other) const {
|
||||
Point2f res = points[innerCornerId];
|
||||
if (typePattern == TypePattern::CENTER) {
|
||||
if (other == TypePattern::RIGHT) {
|
||||
res -= points[(innerCornerId + 1) % 4];
|
||||
res = 0.5f*(res + points[(innerCornerId + 3) % 4] - points[(innerCornerId + 2) % 4]);
|
||||
}
|
||||
else if (other == TypePattern::BOTTOM) {
|
||||
res -= points[(innerCornerId + 3) % 4];
|
||||
res = 0.5f*(res + points[(innerCornerId + 1) % 4] - points[(innerCornerId + 2) % 4]);
|
||||
}
|
||||
}
|
||||
else if (typePattern == TypePattern::RIGHT && other == TypePattern::CENTER) {
|
||||
res = res - points[(innerCornerId + 3) % 4];
|
||||
res = 0.5f*(res + points[(innerCornerId + 1) % 4] - points[(innerCornerId + 2) % 4]);
|
||||
}
|
||||
else if (typePattern == TypePattern::BOTTOM && other == TypePattern::CENTER) {
|
||||
res = res - points[(innerCornerId + 1) % 4];
|
||||
res = 0.5f*(res + points[(innerCornerId + 3) % 4] - points[(innerCornerId + 2) % 4]);
|
||||
}
|
||||
return res;
|
||||
}
|
||||
|
||||
bool checkTriangleAngle(const FinderPatternInfo& patternRight, const FinderPatternInfo& patternBottom, const float length2Vec) {
|
||||
// check the triangle angle btw right & center & bootom sides of QR code
|
||||
// the triangle angle shoud be between 30 and 150 degrees
|
||||
// abs(pi/2 - triangle_angle) should be less 60 degrees
|
||||
const float angle = abs((float)CV_PI/2.f - acos((center - patternRight.center).dot((center - patternBottom.center)) / length2Vec));
|
||||
|
||||
const float maxTriangleDeltaAngle = (float)CV_PI / 3.f;
|
||||
if (angle > maxTriangleDeltaAngle) {
|
||||
return false;
|
||||
}
|
||||
return true;
|
||||
}
|
||||
|
||||
bool checkAngle(const FinderPatternInfo& other, const float maxRotation) {
|
||||
Point2f toOther = getDirectionTo(other.typePattern);
|
||||
Point2f toThis = other.getDirectionTo(typePattern);
|
||||
const float cosAngle = getCosAngle(toOther, toThis);
|
||||
if (cosAngle < 0.f && (CV_PI - acos(cosAngle)) / 2.f < maxRotation) {
|
||||
const float angleCenter = max(acos(getCosAngle(toOther, other.center - center)), acos(getCosAngle(toThis, center - other.center)));
|
||||
if (angleCenter < maxRotation)
|
||||
return true;
|
||||
}
|
||||
return false;
|
||||
}
|
||||
|
||||
static float getCosAngle(const Point2f& vec1, const Point2f& vec2) {
|
||||
float cosAngle = vec1.dot(vec2) / (sqrt(normL2Sqr<float>(vec1)) * sqrt(normL2Sqr<float>(vec2)));
|
||||
cosAngle = std::max(-1.f, cosAngle);
|
||||
cosAngle = std::min(1.f, cosAngle);
|
||||
return cosAngle;
|
||||
}
|
||||
|
||||
pair<int, Point2f> getQRCorner() const {
|
||||
if (typePattern == TypePattern::CENTER) {
|
||||
int id = (innerCornerId + 2) % 4;
|
||||
return std::make_pair(id, points[id]);
|
||||
}
|
||||
else if (typePattern != TypePattern::NONE) {
|
||||
int id = (innerCornerId + 2) % 4;
|
||||
return std::make_pair(id, points[id]);
|
||||
}
|
||||
return std::make_pair(-1, Point2f());
|
||||
}
|
||||
|
||||
pair<int, Point2f> getCornerForIntersection() const {
|
||||
if (typePattern == TypePattern::RIGHT) {
|
||||
int id = (innerCornerId + 3) % 4;
|
||||
return std::make_pair(id, points[id]);
|
||||
}
|
||||
else if (typePattern == TypePattern::BOTTOM) {
|
||||
int id = (innerCornerId + 1) % 4;
|
||||
return std::make_pair(id, points[id]);
|
||||
}
|
||||
return std::make_pair(-1, Point2f());
|
||||
}
|
||||
|
||||
Point2f getTimingStart(TypePattern direction) const {
|
||||
const float timingStartPosition = .5f;
|
||||
const float patternLength = 7.f;
|
||||
Point2f start = points[innerCornerId]*((patternLength - timingStartPosition)/patternLength);
|
||||
if (typePattern == TypePattern::CENTER && direction == TypePattern::RIGHT) {
|
||||
start += points[(innerCornerId + 3) % 4]*(timingStartPosition/patternLength);
|
||||
}
|
||||
else if (typePattern == TypePattern::CENTER && direction == TypePattern::BOTTOM) {
|
||||
start += points[(innerCornerId + 1) % 4]*(timingStartPosition/patternLength);
|
||||
}
|
||||
else if (typePattern == TypePattern::RIGHT && direction == TypePattern::CENTER) {
|
||||
start += points[(innerCornerId + 1) % 4]*(timingStartPosition/patternLength);
|
||||
}
|
||||
else if (typePattern == TypePattern::BOTTOM && direction == TypePattern::CENTER) {
|
||||
start += points[(innerCornerId + 3) % 4]*(timingStartPosition/patternLength);
|
||||
}
|
||||
return start + getDirectionTo(direction)/(patternLength*2.f);
|
||||
}
|
||||
|
||||
// return total white+black modules in timing pattern, total white modules, penaltyPoints
|
||||
Point3i getTimingPatternScore(const Point2f& start, const Point2f& end, Mat &img, const float maxTimingPatternMismatch) const {
|
||||
Rect imageRect(Point(), img.size());
|
||||
int penaltyPoints = 0;
|
||||
int colorCounters[2] = {0, 0};
|
||||
if (imageRect.contains(Point(cvRound(end.x), cvRound(end.y)))) {
|
||||
LineIterator lineIterator(start, end);
|
||||
uint8_t prevValue = img.at<uint8_t>(lineIterator.pos());
|
||||
|
||||
vector<Point> vec = {lineIterator.pos()};
|
||||
|
||||
// the starting position in the timing pattern is the white module white module next to the finder pattern.
|
||||
bool whiteColor = true;
|
||||
lineIterator++;
|
||||
colorCounters[whiteColor]++;
|
||||
|
||||
for(int i = 1; i < lineIterator.count; i++, ++lineIterator) {
|
||||
const uint8_t value = img.at<uint8_t>(lineIterator.pos());
|
||||
if (prevValue != value) {
|
||||
const float dist = sqrt(normL2Sqr<float>((Point2f)(vec.back()-lineIterator.pos())));
|
||||
// check long and short lines in timing pattern
|
||||
const float relativeDiff = max(moduleSize, dist)/min(moduleSize, dist);
|
||||
if (relativeDiff > maxTimingPatternMismatch) {
|
||||
if (dist < moduleSize || relativeDiff < maxTimingPatternMismatch*8.f)
|
||||
penaltyPoints++;
|
||||
else
|
||||
penaltyPoints += cvRound(relativeDiff);
|
||||
}
|
||||
vec.push_back(lineIterator.pos());
|
||||
prevValue = value;
|
||||
whiteColor ^= true;
|
||||
colorCounters[whiteColor]++;
|
||||
}
|
||||
}
|
||||
}
|
||||
return Point3i(colorCounters[0] + colorCounters[1], colorCounters[1], penaltyPoints);
|
||||
}
|
||||
|
||||
FinderPatternInfo& operator*=(const float scale) {
|
||||
moduleSize *= scale;
|
||||
center *= scale;
|
||||
for (auto& point: points)
|
||||
point *= scale;
|
||||
return *this;
|
||||
}
|
||||
|
||||
float moduleSize = 0.f;
|
||||
|
||||
// Index of inner QR corner.
|
||||
// The inner corner is the corner closest to the center of the QR code.
|
||||
int innerCornerId = 0;
|
||||
|
||||
float minQrAngle = 0.f;
|
||||
TypePattern typePattern = NONE;
|
||||
|
||||
Point2f center;
|
||||
vector<Point2f> points;
|
||||
};
|
||||
|
||||
struct QRCode {
|
||||
QRCode() {}
|
||||
|
||||
QRCode(const FinderPatternInfo& _centerPattern, const FinderPatternInfo& _rightPattern, const FinderPatternInfo& _bottomPattern,
|
||||
Point2f _center, float dist): centerPattern(_centerPattern), rightPattern(_rightPattern), bottomPattern(_bottomPattern),
|
||||
center(_center), distance(dist) {
|
||||
moduleSize = (centerPattern.moduleSize + rightPattern.moduleSize + bottomPattern.moduleSize) / 3.f;
|
||||
}
|
||||
|
||||
vector<Point2f> getQRCorners() const {
|
||||
Point2f a1 = rightPattern.getQRCorner().second;
|
||||
Point2f a2 = rightPattern.getCornerForIntersection().second;
|
||||
|
||||
Point2f b1 = bottomPattern.getQRCorner().second;
|
||||
Point2f b2 = bottomPattern.getCornerForIntersection().second;
|
||||
|
||||
Point2f rightBottom = intersectionLines(a1, a2, b1, b2);
|
||||
|
||||
return {centerPattern.getQRCorner().second, rightPattern.getQRCorner().second, rightBottom, bottomPattern.getQRCorner().second};
|
||||
}
|
||||
|
||||
static QRCode checkCompatibilityPattern(const FinderPatternInfo &_pattern1, const FinderPatternInfo& _pattern2, const FinderPatternInfo& _pattern3,
|
||||
Point3i& index, const QRCodeDetectorAruco::Params& qrDetectorParameters) {
|
||||
FinderPatternInfo pattern1 = _pattern1, pattern2 = _pattern2, pattern3 = _pattern3;
|
||||
Point2f centerQR;
|
||||
float distance = std::numeric_limits<float>::max();
|
||||
|
||||
if (abs(pattern1.minQrAngle - pattern2.minQrAngle) > qrDetectorParameters.maxRotation ||
|
||||
abs(pattern1.minQrAngle - pattern3.minQrAngle) > qrDetectorParameters.maxRotation) // check maxRotation
|
||||
return QRCode(pattern1, pattern2, pattern3, centerQR, distance);
|
||||
if (max(pattern1.moduleSize, pattern2.moduleSize) / min(pattern1.moduleSize, pattern2.moduleSize) > qrDetectorParameters.maxModuleSizeMismatch ||
|
||||
max(pattern1.moduleSize, pattern3.moduleSize) / min(pattern1.moduleSize, pattern3.moduleSize) > qrDetectorParameters.maxModuleSizeMismatch)
|
||||
return QRCode(pattern1, pattern2, pattern3, centerQR, distance);
|
||||
// QR code:
|
||||
// center right
|
||||
// 1 ________ 2
|
||||
// |_| |_|
|
||||
// | / |
|
||||
// | / |
|
||||
// | / |
|
||||
// |_ / |
|
||||
// |_|______|
|
||||
// 4
|
||||
// bottom
|
||||
|
||||
// sides length check
|
||||
const float side1 = sqrt(normL2Sqr<float>(pattern1.center - pattern2.center));
|
||||
const float side2 = sqrt(normL2Sqr<float>(pattern1.center - pattern3.center));
|
||||
const float side3 = sqrt(normL2Sqr<float>(pattern2.center - pattern3.center));
|
||||
std::array<float, 3> sides = {side1, side2, side3};
|
||||
std::sort(sides.begin(), sides.end());
|
||||
// check sides diff
|
||||
if (sides[1] / sides[0] < qrDetectorParameters.maxModuleSizeMismatch) {
|
||||
// find center pattern
|
||||
if (side1 > side2 && side1 > side3) { // centerPattern is pattern3
|
||||
std::swap(pattern3, pattern1); // now pattern1 is centerPattern
|
||||
std::swap(index.x, index.z);
|
||||
}
|
||||
else if (side2 > side1 && side2 > side3) { // centerPattern is pattern2
|
||||
std::swap(pattern2, pattern1); // now pattern1 is centerPattern
|
||||
std::swap(index.x, index.y);
|
||||
}
|
||||
// now pattern1 is centerPattern
|
||||
centerQR = (pattern2.center + pattern3.center) / 2.f;
|
||||
pattern1.setType(FinderPatternInfo::TypePattern::CENTER, centerQR);
|
||||
// check triangle angle
|
||||
if (pattern1.checkTriangleAngle(pattern2, pattern3, sides[0]*sides[1]) == false)
|
||||
return QRCode(pattern1, pattern2, pattern3, centerQR, distance);
|
||||
// check that pattern2 is right
|
||||
pattern2.setType(FinderPatternInfo::TypePattern::RIGHT, centerQR);
|
||||
bool ok = pattern1.checkAngle(pattern2, qrDetectorParameters.maxRotation);
|
||||
if (!ok) {
|
||||
// check that pattern3 is right
|
||||
pattern3.setType(FinderPatternInfo::TypePattern::RIGHT, centerQR);
|
||||
ok = pattern1.checkAngle(pattern3, qrDetectorParameters.maxRotation);
|
||||
if (ok) {
|
||||
std::swap(pattern3, pattern2); // now pattern2 is rightPattern
|
||||
std::swap(index.y, index.z);
|
||||
}
|
||||
}
|
||||
if (ok) {
|
||||
// check that pattern3 is bottom
|
||||
pattern3.setType(FinderPatternInfo::TypePattern::BOTTOM, centerQR);
|
||||
ok = pattern1.checkAngle(pattern3, qrDetectorParameters.maxRotation);
|
||||
if (ok) {
|
||||
// intersection check
|
||||
Point2f c1 = intersectionLines(pattern1.getQRCorner().second, pattern1.points[pattern1.innerCornerId],
|
||||
pattern2.getQRCorner().second, pattern2.points[pattern2.innerCornerId]);
|
||||
Point2f c2 = intersectionLines(pattern1.getQRCorner().second, pattern1.points[pattern1.innerCornerId],
|
||||
pattern3.getQRCorner().second, pattern3.points[pattern3.innerCornerId]);
|
||||
const float centerDistance = sqrt(normL2Sqr<float>(c1 - c2));
|
||||
distance = (sides[0] + sides[1] + centerDistance)*(sides[1] / sides[0]);
|
||||
}
|
||||
}
|
||||
}
|
||||
QRCode qrcode(pattern1, pattern2, pattern3, centerQR, distance);
|
||||
return qrcode;
|
||||
}
|
||||
|
||||
int calculateScoreByTimingPattern(Mat &img, const QRCodeDetectorAruco::Params& params) {
|
||||
const int minModulesInTimingPattern = 4;
|
||||
|
||||
const Point3i v1 = centerPattern.getTimingPatternScore(rightPattern.getTimingStart(FinderPatternInfo::CENTER),
|
||||
centerPattern.getTimingStart(FinderPatternInfo::RIGHT), img,
|
||||
params.maxTimingPatternMismatch);
|
||||
|
||||
if ((float)v1.z > params.maxPenalties*v1.x || v1.x <= minModulesInTimingPattern || abs(v1.y / (float)v1.x - 0.5f) > params.maxColorsMismatch)
|
||||
return std::numeric_limits<int>::max();
|
||||
|
||||
const Point3i v2 = centerPattern.getTimingPatternScore(bottomPattern.getTimingStart(FinderPatternInfo::CENTER),
|
||||
centerPattern.getTimingStart(FinderPatternInfo::BOTTOM), img,
|
||||
params.maxTimingPatternMismatch);
|
||||
|
||||
|
||||
if ((float)v2.z > params.maxPenalties*v2.x || v2.x <= minModulesInTimingPattern || abs(v2.y / (float)v2.x - 0.5f) > params.maxColorsMismatch)
|
||||
return std::numeric_limits<int>::max();
|
||||
|
||||
// TODO: add v1, v2 check, add "y" checks
|
||||
float numModules = (sqrt(normL2Sqr<float>((centerPattern.getQRCorner().second - rightPattern.getQRCorner().second)))*0.5f +
|
||||
sqrt(normL2Sqr<float>((centerPattern.getQRCorner().second - bottomPattern.getQRCorner().second))*0.5f)) / moduleSize;
|
||||
|
||||
const int sizeDelta = abs(cvRound(numModules) - (14 + v1.z < v2.z ? v1.x : v2.x));
|
||||
const int colorDelta = abs(v1.x - v1.y - v1.y) + abs(v2.x - v2.y - v2.y);
|
||||
const int score = v1.z + v2.z + sizeDelta + colorDelta;
|
||||
return score;
|
||||
}
|
||||
|
||||
QRCode& operator*=(const float scale) {
|
||||
centerPattern *= scale;
|
||||
rightPattern *= scale;
|
||||
bottomPattern *= scale;
|
||||
center *= scale;
|
||||
moduleSize *= scale;
|
||||
return *this;
|
||||
}
|
||||
|
||||
FinderPatternInfo centerPattern;
|
||||
FinderPatternInfo rightPattern;
|
||||
FinderPatternInfo bottomPattern;
|
||||
Point2f center;
|
||||
float distance = std::numeric_limits<float>::max();
|
||||
int timingPatternScore = std::numeric_limits<int>::max();
|
||||
float moduleSize = 0.f;
|
||||
};
|
||||
|
||||
} // namespace
|
||||
|
||||
static
|
||||
vector<QRCode> analyzeFinderPatterns(const vector<vector<Point2f> > &corners, const Mat& img,
|
||||
const QRCodeDetectorAruco::Params& qrDetectorParameters) {
|
||||
vector<QRCode> qrCodes;
|
||||
vector<FinderPatternInfo> patterns;
|
||||
if (img.empty())
|
||||
return qrCodes;
|
||||
float maxModuleSize = 0.f;
|
||||
for (size_t i = 0ull; i < corners.size(); i++) {
|
||||
FinderPatternInfo pattern = FinderPatternInfo(corners[i]);
|
||||
// TODO: improve thinning Aruco markers
|
||||
bool isUniq = true;
|
||||
for (const FinderPatternInfo& tmp : patterns) {
|
||||
Point2f dist = pattern.center - tmp.center;
|
||||
if (max(abs(dist.x), abs(dist.y)) < 3.f * tmp.moduleSize) {
|
||||
isUniq = false;
|
||||
break;
|
||||
}
|
||||
}
|
||||
if (isUniq) {
|
||||
patterns.push_back(pattern);
|
||||
maxModuleSize = max(maxModuleSize, patterns.back().moduleSize);
|
||||
}
|
||||
}
|
||||
const int threshold = cvRound(qrDetectorParameters.minModuleSizeInPyramid * 12.5f) +
|
||||
(cvRound(qrDetectorParameters.minModuleSizeInPyramid * 12.5f) % 2 ? 0 : 1);
|
||||
int maxLevelPyramid = 0;
|
||||
while (maxModuleSize / 2.f > qrDetectorParameters.minModuleSizeInPyramid) {
|
||||
maxLevelPyramid++;
|
||||
maxModuleSize /= 2.f;
|
||||
}
|
||||
vector<Mat> pyramid;
|
||||
buildPyramid(img, pyramid, maxLevelPyramid);
|
||||
// TODO: ADAPTIVE_THRESH_GAUSSIAN_C vs ADAPTIVE_THRESH_MEAN_C
|
||||
for (Mat& pyr: pyramid) {
|
||||
adaptiveThreshold(pyr, pyr, 255, ADAPTIVE_THRESH_GAUSSIAN_C, THRESH_BINARY, threshold, -1);
|
||||
}
|
||||
|
||||
for (size_t i = 0ull; i < patterns.size(); i++) {
|
||||
QRCode qrCode;
|
||||
int indexes[3] = {0};
|
||||
for (size_t j = i + 1ull; j < patterns.size(); j++) {
|
||||
for (size_t k = j + 1ull; k < patterns.size(); k++) {
|
||||
Point3i index((int)i, (int)j, (int)k);
|
||||
QRCode tmp = QRCode::checkCompatibilityPattern(patterns[i], patterns[j], patterns[k], index, qrDetectorParameters);
|
||||
if (tmp.distance != std::numeric_limits<float>::max()) {
|
||||
int levelPyramid = 0;
|
||||
QRCode qrCopy = tmp;
|
||||
while (tmp.moduleSize / 2.f > qrDetectorParameters.minModuleSizeInPyramid) {
|
||||
tmp *= 0.5f;
|
||||
levelPyramid++;
|
||||
}
|
||||
qrCopy.timingPatternScore = tmp.calculateScoreByTimingPattern(pyramid[levelPyramid], qrDetectorParameters);
|
||||
if (qrCopy.timingPatternScore != std::numeric_limits<int>::max() &&
|
||||
qrCopy.timingPatternScore * qrDetectorParameters.scaleTimingPatternScore < (float)qrCode.timingPatternScore
|
||||
&& qrCopy.distance < qrCode.distance)
|
||||
{
|
||||
qrCode = qrCopy;
|
||||
indexes[0] = (int)i;
|
||||
indexes[1] = (int)j;
|
||||
indexes[2] = (int)k;
|
||||
}
|
||||
}
|
||||
}
|
||||
}
|
||||
if (qrCode.distance != std::numeric_limits<float>::max()) {
|
||||
qrCodes.push_back(qrCode);
|
||||
std::swap(patterns[indexes[2]], patterns.back());
|
||||
patterns.pop_back();
|
||||
std::swap(patterns[indexes[1]], patterns.back());
|
||||
patterns.pop_back();
|
||||
std::swap(patterns[indexes[0]], patterns.back());
|
||||
patterns.pop_back();
|
||||
i--;
|
||||
}
|
||||
}
|
||||
return qrCodes;
|
||||
}
|
||||
|
||||
struct PimplQRAruco : public ImplContour {
|
||||
QRCodeDetectorAruco::Params qrParams;
|
||||
aruco::ArucoDetector arucoDetector;
|
||||
aruco::DetectorParameters arucoParams;
|
||||
|
||||
PimplQRAruco() {
|
||||
Mat bits = Mat::ones(Size(5, 5), CV_8UC1);
|
||||
Mat(bits, Rect(1, 1, 3, 3)).setTo(Scalar(0));
|
||||
Mat byteList = aruco::Dictionary::getByteListFromBits(bits);
|
||||
aruco::Dictionary dictionary = aruco::Dictionary(byteList, 5, 4);
|
||||
arucoParams.minMarkerPerimeterRate = 0.02;
|
||||
arucoDetector = aruco::ArucoDetector(dictionary, arucoParams);
|
||||
}
|
||||
|
||||
bool detectMulti(InputArray in, OutputArray points) const override {
|
||||
Mat gray;
|
||||
if (!checkQRInputImage(in, gray)) {
|
||||
points.release();
|
||||
return false;
|
||||
}
|
||||
vector<Point2f> result;
|
||||
vector<vector<Point2f> > corners;
|
||||
vector<int> ids;
|
||||
arucoDetector.detectMarkers(gray, corners, ids);
|
||||
if (corners.size() >= 3ull) {
|
||||
vector<QRCode> qrCodes = analyzeFinderPatterns(corners, gray.clone(), qrParams);
|
||||
if (qrCodes.size() == 0ull)
|
||||
return false;
|
||||
for (auto& qr : qrCodes) {
|
||||
for (Point2f& corner : qr.getQRCorners()) {
|
||||
result.push_back(corner);
|
||||
}
|
||||
}
|
||||
}
|
||||
if (result.size() >= 4) {
|
||||
updatePointsResult(points, result);
|
||||
return true;
|
||||
}
|
||||
return false;
|
||||
}
|
||||
|
||||
bool detect(InputArray img, OutputArray points) const override {
|
||||
vector<Point2f> corners, result;
|
||||
bool flag = detectMulti(img, corners);
|
||||
CV_Assert((int)corners.size() % 4 == 0);
|
||||
|
||||
Point2f imageCenter(((float)img.cols())/2.f, ((float)img.rows())/2.f);
|
||||
size_t minQrId = 0ull;
|
||||
float minDist = std::numeric_limits<float>::max();
|
||||
for (size_t i = 0ull; i < corners.size(); i += 4ull) {
|
||||
Point2f qrCenter((corners[i] + corners[i+1ull] + corners[i+2ull] + corners[i+3ull]) / 4.f);
|
||||
float dist = sqrt(normL2Sqr<float>(qrCenter - imageCenter));
|
||||
if (dist < minDist) {
|
||||
minQrId = i;
|
||||
minDist = dist;
|
||||
}
|
||||
}
|
||||
if (flag) {
|
||||
result = {corners[minQrId], corners[minQrId+1ull], corners[minQrId+2ull], corners[minQrId+3ull]};
|
||||
updatePointsResult(points, result);
|
||||
}
|
||||
return flag;
|
||||
}
|
||||
};
|
||||
|
||||
QRCodeDetectorAruco::QRCodeDetectorAruco() {
|
||||
p = makePtr<PimplQRAruco>();
|
||||
}
|
||||
|
||||
QRCodeDetectorAruco::QRCodeDetectorAruco(const QRCodeDetectorAruco::Params& params) {
|
||||
p = makePtr<PimplQRAruco>();
|
||||
std::dynamic_pointer_cast<PimplQRAruco>(p)->qrParams = params;
|
||||
}
|
||||
|
||||
const QRCodeDetectorAruco::Params& QRCodeDetectorAruco::getDetectorParameters() const {
|
||||
return std::dynamic_pointer_cast<PimplQRAruco>(p)->qrParams;
|
||||
}
|
||||
|
||||
QRCodeDetectorAruco& QRCodeDetectorAruco::setDetectorParameters(const QRCodeDetectorAruco::Params& params) {
|
||||
std::dynamic_pointer_cast<PimplQRAruco>(p)->qrParams = params;
|
||||
return *this;
|
||||
}
|
||||
|
||||
aruco::DetectorParameters QRCodeDetectorAruco::getArucoParameters() {
|
||||
return std::dynamic_pointer_cast<PimplQRAruco>(p)->arucoParams;
|
||||
}
|
||||
|
||||
void QRCodeDetectorAruco::setArucoParameters(const aruco::DetectorParameters& params) {
|
||||
std::dynamic_pointer_cast<PimplQRAruco>(p)->arucoParams = params;
|
||||
}
|
||||
|
||||
} // namespace
|
||||
|
||||
78
modules/objdetect/test/test_qr_utils.hpp
Normal file
78
modules/objdetect/test/test_qr_utils.hpp
Normal file
@ -0,0 +1,78 @@
|
||||
// This file is part of OpenCV project.
|
||||
// It is subject to the license terms in the LICENSE file found in the top-level directory
|
||||
// of this distribution and at http://opencv.org/license.html.
|
||||
#include "test_precomp.hpp"
|
||||
|
||||
namespace opencv_test {
|
||||
|
||||
static inline
|
||||
void check_qr(const string& root, const string& name_current_image, const string& config_name,
|
||||
const std::vector<Point>& corners,
|
||||
const std::vector<string>& decoded_info, const int max_pixel_error,
|
||||
bool isMulti = false) {
|
||||
const std::string dataset_config = findDataFile(root + "dataset_config.json");
|
||||
FileStorage file_config(dataset_config, FileStorage::READ);
|
||||
ASSERT_TRUE(file_config.isOpened()) << "Can't read validation data: " << dataset_config;
|
||||
FileNode images_list = file_config[config_name];
|
||||
size_t images_count = static_cast<size_t>(images_list.size());
|
||||
ASSERT_GT(images_count, 0u) << "Can't find validation data entries in 'test_images': " << dataset_config;
|
||||
for (size_t index = 0; index < images_count; index++) {
|
||||
FileNode config = images_list[(int)index];
|
||||
std::string name_test_image = config["image_name"];
|
||||
if (name_test_image == name_current_image) {
|
||||
if (isMulti) {
|
||||
for(int j = 0; j < int(corners.size()); j += 4) {
|
||||
bool ok = false;
|
||||
for (int k = 0; k < int(corners.size() / 4); k++) {
|
||||
int count_eq_points = 0;
|
||||
for (int i = 0; i < 4; i++) {
|
||||
int x = config["x"][k][i];
|
||||
int y = config["y"][k][i];
|
||||
if(((abs(corners[j + i].x - x)) <= max_pixel_error) && ((abs(corners[j + i].y - y)) <= max_pixel_error))
|
||||
count_eq_points++;
|
||||
}
|
||||
if (count_eq_points == 4) {
|
||||
ok = true;
|
||||
break;
|
||||
}
|
||||
}
|
||||
EXPECT_TRUE(ok);
|
||||
}
|
||||
}
|
||||
else {
|
||||
for (int i = 0; i < (int)corners.size(); i++) {
|
||||
int x = config["x"][i];
|
||||
int y = config["y"][i];
|
||||
EXPECT_NEAR(x, corners[i].x, max_pixel_error);
|
||||
EXPECT_NEAR(y, corners[i].y, max_pixel_error);
|
||||
}
|
||||
}
|
||||
#ifdef HAVE_QUIRC
|
||||
if (decoded_info.size() == 0ull)
|
||||
return;
|
||||
if (isMulti) {
|
||||
size_t count_eq_info = 0;
|
||||
for(int i = 0; i < int(decoded_info.size()); i++) {
|
||||
for(int j = 0; j < int(decoded_info.size()); j++) {
|
||||
std::string original_info = config["info"][j];
|
||||
if(original_info == decoded_info[i]) {
|
||||
count_eq_info++;
|
||||
break;
|
||||
}
|
||||
}
|
||||
}
|
||||
EXPECT_EQ(decoded_info.size(), count_eq_info);
|
||||
}
|
||||
else {
|
||||
std::string original_info = config["info"];
|
||||
EXPECT_EQ(decoded_info[0], original_info);
|
||||
}
|
||||
#endif
|
||||
return; // done
|
||||
}
|
||||
}
|
||||
FAIL() << "Not found results for '" << name_current_image << "' image in config file:" << dataset_config <<
|
||||
"Re-run tests with enabled UPDATE_QRCODE_TEST_DATA macro to update test data.\n";
|
||||
}
|
||||
|
||||
}
|
||||
@ -3,6 +3,7 @@
|
||||
// of this distribution and at http://opencv.org/license.html.
|
||||
|
||||
#include "test_precomp.hpp"
|
||||
#include "test_qr_utils.hpp"
|
||||
#include "opencv2/imgproc.hpp"
|
||||
|
||||
namespace opencv_test { namespace {
|
||||
@ -33,6 +34,8 @@ std::string qrcode_images_multiple[] = {
|
||||
"5_qrcodes.png", "6_qrcodes.png", "7_qrcodes.png", "8_close_qrcodes.png"
|
||||
};
|
||||
|
||||
static std::set<std::pair<std::string, std::string>> disabled_samples = {{"5_qrcodes.png", "aruco_based"}};
|
||||
|
||||
//#define UPDATE_QRCODE_TEST_DATA
|
||||
#ifdef UPDATE_QRCODE_TEST_DATA
|
||||
|
||||
@ -262,43 +265,7 @@ TEST_P(Objdetect_QRCode, regression)
|
||||
#else
|
||||
ASSERT_TRUE(qrcode.detect(src, corners));
|
||||
#endif
|
||||
|
||||
const std::string dataset_config = findDataFile(root + "dataset_config.json");
|
||||
FileStorage file_config(dataset_config, FileStorage::READ);
|
||||
ASSERT_TRUE(file_config.isOpened()) << "Can't read validation data: " << dataset_config;
|
||||
{
|
||||
FileNode images_list = file_config["test_images"];
|
||||
size_t images_count = static_cast<size_t>(images_list.size());
|
||||
ASSERT_GT(images_count, 0u) << "Can't find validation data entries in 'test_images': " << dataset_config;
|
||||
|
||||
for (size_t index = 0; index < images_count; index++)
|
||||
{
|
||||
FileNode config = images_list[(int)index];
|
||||
std::string name_test_image = config["image_name"];
|
||||
if (name_test_image == name_current_image)
|
||||
{
|
||||
for (int i = 0; i < 4; i++)
|
||||
{
|
||||
int x = config["x"][i];
|
||||
int y = config["y"][i];
|
||||
EXPECT_NEAR(x, corners[i].x, pixels_error);
|
||||
EXPECT_NEAR(y, corners[i].y, pixels_error);
|
||||
}
|
||||
|
||||
#ifdef HAVE_QUIRC
|
||||
std::string original_info = config["info"];
|
||||
EXPECT_EQ(decoded_info, original_info);
|
||||
#endif
|
||||
|
||||
return; // done
|
||||
}
|
||||
}
|
||||
std::cerr
|
||||
<< "Not found results for '" << name_current_image
|
||||
<< "' image in config file:" << dataset_config << std::endl
|
||||
<< "Re-run tests with enabled UPDATE_QRCODE_TEST_DATA macro to update test data."
|
||||
<< std::endl;
|
||||
}
|
||||
check_qr(root, name_current_image, "test_images", corners, {decoded_info}, pixels_error);
|
||||
}
|
||||
|
||||
typedef testing::TestWithParam< std::string > Objdetect_QRCode_Close;
|
||||
@ -329,43 +296,7 @@ TEST_P(Objdetect_QRCode_Close, regression)
|
||||
#else
|
||||
ASSERT_TRUE(qrcode.detect(barcode, corners));
|
||||
#endif
|
||||
|
||||
const std::string dataset_config = findDataFile(root + "dataset_config.json");
|
||||
FileStorage file_config(dataset_config, FileStorage::READ);
|
||||
ASSERT_TRUE(file_config.isOpened()) << "Can't read validation data: " << dataset_config;
|
||||
{
|
||||
FileNode images_list = file_config["close_images"];
|
||||
size_t images_count = static_cast<size_t>(images_list.size());
|
||||
ASSERT_GT(images_count, 0u) << "Can't find validation data entries in 'test_images': " << dataset_config;
|
||||
|
||||
for (size_t index = 0; index < images_count; index++)
|
||||
{
|
||||
FileNode config = images_list[(int)index];
|
||||
std::string name_test_image = config["image_name"];
|
||||
if (name_test_image == name_current_image)
|
||||
{
|
||||
for (int i = 0; i < 4; i++)
|
||||
{
|
||||
int x = config["x"][i];
|
||||
int y = config["y"][i];
|
||||
EXPECT_NEAR(x, corners[i].x, pixels_error);
|
||||
EXPECT_NEAR(y, corners[i].y, pixels_error);
|
||||
}
|
||||
|
||||
#ifdef HAVE_QUIRC
|
||||
std::string original_info = config["info"];
|
||||
EXPECT_EQ(decoded_info, original_info);
|
||||
#endif
|
||||
|
||||
return; // done
|
||||
}
|
||||
}
|
||||
std::cerr
|
||||
<< "Not found results for '" << name_current_image
|
||||
<< "' image in config file:" << dataset_config << std::endl
|
||||
<< "Re-run tests with enabled UPDATE_QRCODE_TEST_DATA macro to update test data."
|
||||
<< std::endl;
|
||||
}
|
||||
check_qr(root, name_current_image, "close_images", corners, {decoded_info}, pixels_error);
|
||||
}
|
||||
|
||||
typedef testing::TestWithParam< std::string > Objdetect_QRCode_Monitor;
|
||||
@ -396,43 +327,7 @@ TEST_P(Objdetect_QRCode_Monitor, regression)
|
||||
#else
|
||||
ASSERT_TRUE(qrcode.detect(barcode, corners));
|
||||
#endif
|
||||
|
||||
const std::string dataset_config = findDataFile(root + "dataset_config.json");
|
||||
FileStorage file_config(dataset_config, FileStorage::READ);
|
||||
ASSERT_TRUE(file_config.isOpened()) << "Can't read validation data: " << dataset_config;
|
||||
{
|
||||
FileNode images_list = file_config["monitor_images"];
|
||||
size_t images_count = static_cast<size_t>(images_list.size());
|
||||
ASSERT_GT(images_count, 0u) << "Can't find validation data entries in 'test_images': " << dataset_config;
|
||||
|
||||
for (size_t index = 0; index < images_count; index++)
|
||||
{
|
||||
FileNode config = images_list[(int)index];
|
||||
std::string name_test_image = config["image_name"];
|
||||
if (name_test_image == name_current_image)
|
||||
{
|
||||
for (int i = 0; i < 4; i++)
|
||||
{
|
||||
int x = config["x"][i];
|
||||
int y = config["y"][i];
|
||||
EXPECT_NEAR(x, corners[i].x, pixels_error);
|
||||
EXPECT_NEAR(y, corners[i].y, pixels_error);
|
||||
}
|
||||
|
||||
#ifdef HAVE_QUIRC
|
||||
std::string original_info = config["info"];
|
||||
EXPECT_EQ(decoded_info, original_info);
|
||||
#endif
|
||||
|
||||
return; // done
|
||||
}
|
||||
}
|
||||
std::cerr
|
||||
<< "Not found results for '" << name_current_image
|
||||
<< "' image in config file:" << dataset_config << std::endl
|
||||
<< "Re-run tests with enabled UPDATE_QRCODE_TEST_DATA macro to update test data."
|
||||
<< std::endl;
|
||||
}
|
||||
check_qr(root, name_current_image, "monitor_images", corners, {decoded_info}, pixels_error);
|
||||
}
|
||||
|
||||
typedef testing::TestWithParam< std::string > Objdetect_QRCode_Curved;
|
||||
@ -458,56 +353,26 @@ TEST_P(Objdetect_QRCode_Curved, regression)
|
||||
#else
|
||||
ASSERT_TRUE(qrcode.detect(src, corners));
|
||||
#endif
|
||||
|
||||
const std::string dataset_config = findDataFile(root + "dataset_config.json");
|
||||
FileStorage file_config(dataset_config, FileStorage::READ);
|
||||
ASSERT_TRUE(file_config.isOpened()) << "Can't read validation data: " << dataset_config;
|
||||
{
|
||||
FileNode images_list = file_config["test_images"];
|
||||
size_t images_count = static_cast<size_t>(images_list.size());
|
||||
ASSERT_GT(images_count, 0u) << "Can't find validation data entries in 'test_images': " << dataset_config;
|
||||
|
||||
for (size_t index = 0; index < images_count; index++)
|
||||
{
|
||||
FileNode config = images_list[(int)index];
|
||||
std::string name_test_image = config["image_name"];
|
||||
if (name_test_image == name_current_image)
|
||||
{
|
||||
for (int i = 0; i < 4; i++)
|
||||
{
|
||||
int x = config["x"][i];
|
||||
int y = config["y"][i];
|
||||
EXPECT_NEAR(x, corners[i].x, pixels_error);
|
||||
EXPECT_NEAR(y, corners[i].y, pixels_error);
|
||||
}
|
||||
|
||||
#ifdef HAVE_QUIRC
|
||||
std::string original_info = config["info"];
|
||||
EXPECT_EQ(decoded_info, original_info);
|
||||
#endif
|
||||
|
||||
return; // done
|
||||
}
|
||||
}
|
||||
std::cerr
|
||||
<< "Not found results for '" << name_current_image
|
||||
<< "' image in config file:" << dataset_config << std::endl
|
||||
<< "Re-run tests with enabled UPDATE_QRCODE_TEST_DATA macro to update test data."
|
||||
<< std::endl;
|
||||
}
|
||||
check_qr(root, name_current_image, "test_images", corners, {decoded_info}, pixels_error);
|
||||
}
|
||||
|
||||
typedef testing::TestWithParam < std::string > Objdetect_QRCode_Multi;
|
||||
typedef testing::TestWithParam<std::tuple<std::string, std::string>> Objdetect_QRCode_Multi;
|
||||
TEST_P(Objdetect_QRCode_Multi, regression)
|
||||
{
|
||||
const std::string name_current_image = GetParam();
|
||||
const std::string name_current_image = get<0>(GetParam());
|
||||
const std::string root = "qrcode/multiple/";
|
||||
const std::string method = get<1>(GetParam());
|
||||
const int pixels_error = 4;
|
||||
|
||||
std::string image_path = findDataFile(root + name_current_image);
|
||||
Mat src = imread(image_path);
|
||||
ASSERT_FALSE(src.empty()) << "Can't read image: " << image_path;
|
||||
QRCodeDetector qrcode;
|
||||
if (disabled_samples.find({name_current_image, method}) != disabled_samples.end())
|
||||
throw SkipTestException(name_current_image + " is disabled sample for method " + method);
|
||||
QRCodeDetectorBase qrcode = QRCodeDetector();
|
||||
if (method == "aruco_based") {
|
||||
qrcode = QRCodeDetectorAruco();
|
||||
}
|
||||
std::vector<Point> corners;
|
||||
#ifdef HAVE_QUIRC
|
||||
std::vector<cv::String> decoded_info;
|
||||
@ -521,75 +386,15 @@ TEST_P(Objdetect_QRCode_Multi, regression)
|
||||
#else
|
||||
ASSERT_TRUE(qrcode.detectMulti(src, corners));
|
||||
#endif
|
||||
|
||||
const std::string dataset_config = findDataFile(root + "dataset_config.json");
|
||||
FileStorage file_config(dataset_config, FileStorage::READ);
|
||||
ASSERT_TRUE(file_config.isOpened()) << "Can't read validation data: " << dataset_config;
|
||||
{
|
||||
FileNode images_list = file_config["multiple_images"];
|
||||
size_t images_count = static_cast<size_t>(images_list.size());
|
||||
ASSERT_GT(images_count, 0u) << "Can't find validation data entries in 'test_images': " << dataset_config;
|
||||
for (size_t index = 0; index < images_count; index++)
|
||||
{
|
||||
FileNode config = images_list[(int)index];
|
||||
std::string name_test_image = config["image_name"];
|
||||
if (name_test_image == name_current_image)
|
||||
{
|
||||
for(int j = 0; j < int(corners.size()); j += 4)
|
||||
{
|
||||
bool ok = false;
|
||||
for (int k = 0; k < int(corners.size() / 4); k++)
|
||||
{
|
||||
int count_eq_points = 0;
|
||||
for (int i = 0; i < 4; i++)
|
||||
{
|
||||
int x = config["x"][k][i];
|
||||
int y = config["y"][k][i];
|
||||
if(((abs(corners[j + i].x - x)) <= pixels_error) && ((abs(corners[j + i].y - y)) <= pixels_error))
|
||||
count_eq_points++;
|
||||
}
|
||||
if (count_eq_points == 4)
|
||||
{
|
||||
ok = true;
|
||||
break;
|
||||
}
|
||||
}
|
||||
EXPECT_TRUE(ok);
|
||||
}
|
||||
|
||||
#ifdef HAVE_QUIRC
|
||||
size_t count_eq_info = 0;
|
||||
for(int i = 0; i < int(decoded_info.size()); i++)
|
||||
{
|
||||
for(int j = 0; j < int(decoded_info.size()); j++)
|
||||
{
|
||||
std::string original_info = config["info"][j];
|
||||
if(original_info == decoded_info[i])
|
||||
{
|
||||
count_eq_info++;
|
||||
break;
|
||||
}
|
||||
}
|
||||
}
|
||||
EXPECT_EQ(decoded_info.size(), count_eq_info);
|
||||
#endif
|
||||
|
||||
return; // done
|
||||
}
|
||||
}
|
||||
std::cerr
|
||||
<< "Not found results for '" << name_current_image
|
||||
<< "' image in config file:" << dataset_config << std::endl
|
||||
<< "Re-run tests with enabled UPDATE_QRCODE_TEST_DATA macro to update test data."
|
||||
<< std::endl;
|
||||
}
|
||||
check_qr(root, name_current_image, "multiple_images", corners, decoded_info, pixels_error, true);
|
||||
}
|
||||
|
||||
INSTANTIATE_TEST_CASE_P(/**/, Objdetect_QRCode, testing::ValuesIn(qrcode_images_name));
|
||||
INSTANTIATE_TEST_CASE_P(/**/, Objdetect_QRCode_Close, testing::ValuesIn(qrcode_images_close));
|
||||
INSTANTIATE_TEST_CASE_P(/**/, Objdetect_QRCode_Monitor, testing::ValuesIn(qrcode_images_monitor));
|
||||
INSTANTIATE_TEST_CASE_P(/**/, Objdetect_QRCode_Curved, testing::ValuesIn(qrcode_images_curved));
|
||||
INSTANTIATE_TEST_CASE_P(/**/, Objdetect_QRCode_Multi, testing::ValuesIn(qrcode_images_multiple));
|
||||
INSTANTIATE_TEST_CASE_P(/**/, Objdetect_QRCode_Multi, testing::Combine(testing::ValuesIn(qrcode_images_multiple),
|
||||
testing::Values("contours_based", "aruco_based")));
|
||||
|
||||
TEST(Objdetect_QRCode_decodeMulti, decode_regression_16491)
|
||||
{
|
||||
@ -611,8 +416,10 @@ TEST(Objdetect_QRCode_decodeMulti, decode_regression_16491)
|
||||
#endif
|
||||
}
|
||||
|
||||
TEST(Objdetect_QRCode_detectMulti, detect_regression_16961)
|
||||
typedef testing::TestWithParam<std::string> Objdetect_QRCode_detectMulti;
|
||||
TEST_P(Objdetect_QRCode_detectMulti, detect_regression_16961)
|
||||
{
|
||||
const std::string method = GetParam();
|
||||
const std::string name_current_image = "9_qrcodes.jpg";
|
||||
const std::string root = "qrcode/multiple/";
|
||||
|
||||
@ -620,7 +427,10 @@ TEST(Objdetect_QRCode_detectMulti, detect_regression_16961)
|
||||
Mat src = imread(image_path);
|
||||
ASSERT_FALSE(src.empty()) << "Can't read image: " << image_path;
|
||||
|
||||
QRCodeDetector qrcode;
|
||||
QRCodeDetectorBase qrcode = QRCodeDetector();
|
||||
if (method == "aruco_based") {
|
||||
qrcode = QRCodeDetectorAruco();
|
||||
}
|
||||
std::vector<Point> corners;
|
||||
EXPECT_TRUE(qrcode.detectMulti(src, corners));
|
||||
ASSERT_FALSE(corners.empty());
|
||||
@ -628,21 +438,27 @@ TEST(Objdetect_QRCode_detectMulti, detect_regression_16961)
|
||||
EXPECT_EQ(corners.size(), expect_corners_size);
|
||||
}
|
||||
|
||||
TEST(Objdetect_QRCode_decodeMulti, check_output_parameters_type_19363)
|
||||
INSTANTIATE_TEST_CASE_P(/**/, Objdetect_QRCode_detectMulti, testing::Values("contours_based", "aruco_based"));
|
||||
typedef testing::TestWithParam<std::string> Objdetect_QRCode_detectAndDecodeMulti;
|
||||
TEST_P(Objdetect_QRCode_detectAndDecodeMulti, check_output_parameters_type_19363)
|
||||
{
|
||||
const std::string name_current_image = "9_qrcodes.jpg";
|
||||
const std::string root = "qrcode/multiple/";
|
||||
const std::string method = GetParam();
|
||||
|
||||
std::string image_path = findDataFile(root + name_current_image);
|
||||
Mat src = imread(image_path);
|
||||
ASSERT_FALSE(src.empty()) << "Can't read image: " << image_path;
|
||||
#ifdef HAVE_QUIRC
|
||||
QRCodeDetector qrcode;
|
||||
QRCodeDetectorBase qrcode = QRCodeDetector();
|
||||
if (method == "aruco_based") {
|
||||
qrcode = QRCodeDetectorAruco();
|
||||
}
|
||||
std::vector<Point> corners;
|
||||
std::vector<cv::String> decoded_info;
|
||||
#if 0 // FIXIT: OutputArray::create() type check
|
||||
std::vector<Mat2b> straight_barcode_nchannels;
|
||||
EXPECT_ANY_THROW(qrcode.detectAndDecodeMulti(src, decoded_info, corners, straight_barcode_nchannels));
|
||||
EXPECT_ANY_THROW(qrcode->detectAndDecodeMulti(src, decoded_info, corners, straight_barcode_nchannels));
|
||||
#endif
|
||||
|
||||
int expected_barcode_type = CV_8UC1;
|
||||
@ -653,6 +469,8 @@ TEST(Objdetect_QRCode_decodeMulti, check_output_parameters_type_19363)
|
||||
EXPECT_EQ(expected_barcode_type, straight_barcode[i].type());
|
||||
#endif
|
||||
}
|
||||
INSTANTIATE_TEST_CASE_P(/**/, Objdetect_QRCode_detectAndDecodeMulti, testing::Values("contours_based", "aruco_based"));
|
||||
|
||||
|
||||
TEST(Objdetect_QRCode_detect, detect_regression_20882)
|
||||
{
|
||||
@ -793,14 +611,18 @@ TEST(Objdetect_QRCode_decode, decode_regression_version_25)
|
||||
#endif
|
||||
}
|
||||
|
||||
TEST(Objdetect_QRCode_decodeMulti, decode_9_qrcodes_version7)
|
||||
TEST_P(Objdetect_QRCode_detectAndDecodeMulti, decode_9_qrcodes_version7)
|
||||
{
|
||||
const std::string name_current_image = "9_qrcodes_version7.jpg";
|
||||
const std::string root = "qrcode/multiple/";
|
||||
|
||||
std::string image_path = findDataFile(root + name_current_image);
|
||||
Mat src = imread(image_path);
|
||||
QRCodeDetector qrcode;
|
||||
const std::string method = GetParam();
|
||||
QRCodeDetectorBase qrcode = QRCodeDetector();
|
||||
if (method == "aruco_based") {
|
||||
qrcode = QRCodeDetectorAruco();
|
||||
}
|
||||
std::vector<Point> corners;
|
||||
std::vector<cv::String> decoded_info;
|
||||
|
||||
|
||||
@ -12,6 +12,7 @@ using namespace cv;
|
||||
static int liveQRCodeDetect();
|
||||
static int imageQRCodeDetect(const string& in_file);
|
||||
|
||||
static bool g_useArucoBased = false;
|
||||
static bool g_modeMultiQR = false;
|
||||
static bool g_detectOnly = false;
|
||||
|
||||
@ -35,6 +36,7 @@ int main(int argc, char *argv[])
|
||||
const string keys =
|
||||
"{h help ? | | print help messages }"
|
||||
"{i in | | input image path (also switches to image detection mode) }"
|
||||
"{aruco_based | false | use Aruco-based QR code detector instead of contour-based }"
|
||||
"{detect | false | detect QR code only (skip decoding) }"
|
||||
"{m multi | | use detect for multiple qr-codes }"
|
||||
"{o out | qr_code.png | path to result file }"
|
||||
@ -75,6 +77,7 @@ int main(int argc, char *argv[])
|
||||
|
||||
g_modeMultiQR = cmd_parser.has("multi") && cmd_parser.get<bool>("multi");
|
||||
g_detectOnly = cmd_parser.has("detect") && cmd_parser.get<bool>("detect");
|
||||
g_useArucoBased = cmd_parser.has("aruco_based") && cmd_parser.get<bool>("aruco_based");
|
||||
|
||||
g_saveDetections = cmd_parser.has("save_detections") && cmd_parser.get<bool>("save_detections");
|
||||
g_saveAll = cmd_parser.has("save_all") && cmd_parser.get<bool>("save_all");
|
||||
@ -157,7 +160,7 @@ void drawQRCodeResults(Mat& frame, const vector<Point>& corners, const vector<cv
|
||||
|
||||
static
|
||||
void runQR(
|
||||
QRCodeDetector& qrcode, const Mat& input,
|
||||
const QRCodeDetectorBase& qrcode, const Mat& input,
|
||||
vector<Point>& corners, vector<cv::String>& decode_info
|
||||
// +global: bool g_modeMultiQR, bool g_detectOnly
|
||||
)
|
||||
@ -191,7 +194,7 @@ void runQR(
|
||||
}
|
||||
|
||||
static
|
||||
double processQRCodeDetection(QRCodeDetector& qrcode, const Mat& input, Mat& result, vector<Point>& corners)
|
||||
double processQRCodeDetection(const QRCodeDetectorBase& qrcode, const Mat& input, Mat& result, vector<Point>& corners)
|
||||
{
|
||||
if (input.channels() == 1)
|
||||
cvtColor(input, result, COLOR_GRAY2BGR);
|
||||
@ -229,7 +232,9 @@ int liveQRCodeDetect()
|
||||
cout << "Press 'd' to switch between decoder and detector" << endl;
|
||||
cout << "Press ' ' (space) to save result into images" << endl;
|
||||
cout << "Press 'ESC' to exit" << endl;
|
||||
QRCodeDetector qrcode;
|
||||
QRCodeDetectorBase qrcode = QRCodeDetector();
|
||||
if (g_useArucoBased)
|
||||
qrcode = QRCodeDetectorAruco();
|
||||
|
||||
for (;;)
|
||||
{
|
||||
@ -310,7 +315,10 @@ int imageQRCodeDetect(const string& in_file)
|
||||
<< " on image: " << input.size() << " (" << typeToString(input.type()) << ")"
|
||||
<< endl;
|
||||
|
||||
QRCodeDetector qrcode;
|
||||
QRCodeDetectorBase qrcode = QRCodeDetector();
|
||||
if (g_useArucoBased)
|
||||
qrcode = QRCodeDetectorAruco();
|
||||
|
||||
vector<Point> corners;
|
||||
vector<cv::String> decode_info;
|
||||
|
||||
|
||||
Loading…
Reference in New Issue
Block a user