mirror of
https://github.com/opencv/opencv.git
synced 2024-12-12 15:19:11 +08:00
features2d: reduce accuracy test avg memory consumption #25424
**Merge with contrib**: https://github.com/opencv/opencv_contrib/pull/3722
I've observed high memory consumption in the `opencv_test_features2d` (x86_64, Ubuntu 22.04, Debug):
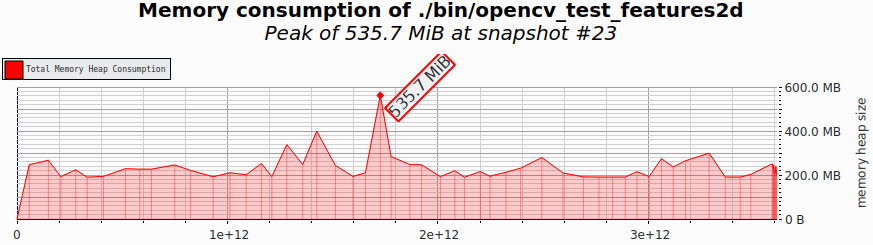
It's always more than 180 MiB with peak at 535 MiB
This was caused by pointers to the algorithm object instances stored in the tests parameters. I've replaced them with factory functions/lambdas with the following result:
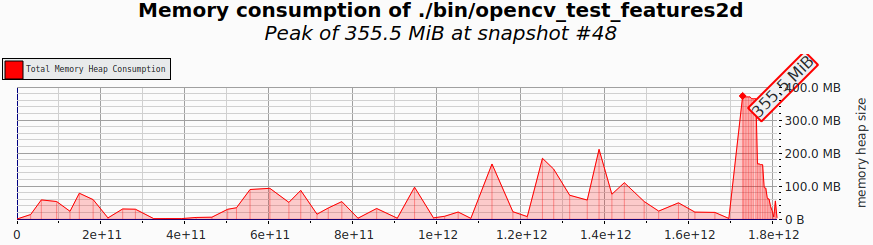
Now peak is at 355 MiB and permanent consumption level is ~ 1-2 MiB
**Note:** current peak is caused by KAZE features allocating 8x image size utility buffers. Not sure if we can or should do anything about it: 66fb5021e9/modules/features2d/src/kaze/KAZEFeatures.cpp (L61-L68)
227 lines
8.0 KiB
C++
227 lines
8.0 KiB
C++
// This file is part of OpenCV project.
|
|
// It is subject to the license terms in the LICENSE file found in the top-level directory
|
|
// of this distribution and at http://opencv.org/license.html
|
|
|
|
#include "test_invariance_utils.hpp"
|
|
#include <functional>
|
|
|
|
namespace opencv_test { namespace {
|
|
|
|
#define SHOW_DEBUG_LOG 1
|
|
|
|
// NOTE: using factory function (function<Ptr<Type>()>) instead of object instance (Ptr<Type>) as a
|
|
// test parameter, because parameters exist during whole test program run and consume a lot of memory
|
|
typedef std::function<cv::Ptr<cv::FeatureDetector>()> DetectorFactory;
|
|
typedef tuple<std::string, DetectorFactory, float, float> String_FeatureDetector_Float_Float_t;
|
|
|
|
|
|
static
|
|
void matchKeyPoints(const vector<KeyPoint>& keypoints0, const Mat& H,
|
|
const vector<KeyPoint>& keypoints1,
|
|
vector<DMatch>& matches)
|
|
{
|
|
vector<Point2f> points0;
|
|
KeyPoint::convert(keypoints0, points0);
|
|
Mat points0t;
|
|
if(H.empty())
|
|
points0t = Mat(points0);
|
|
else
|
|
perspectiveTransform(Mat(points0), points0t, H);
|
|
|
|
matches.clear();
|
|
for(int i0 = 0; i0 < static_cast<int>(keypoints0.size()); i0++)
|
|
{
|
|
int nearestPointIndex = -1;
|
|
float maxIntersectRatio = 0.f;
|
|
const float r0 = 0.5f * keypoints0[i0].size;
|
|
for(size_t i1 = 0; i1 < keypoints1.size(); i1++)
|
|
{
|
|
|
|
float r1 = 0.5f * keypoints1[i1].size;
|
|
float intersectRatio = calcIntersectRatio(points0t.at<Point2f>(i0), r0,
|
|
keypoints1[i1].pt, r1);
|
|
if(intersectRatio > maxIntersectRatio)
|
|
{
|
|
maxIntersectRatio = intersectRatio;
|
|
nearestPointIndex = static_cast<int>(i1);
|
|
}
|
|
}
|
|
|
|
matches.push_back(DMatch(i0, nearestPointIndex, maxIntersectRatio));
|
|
}
|
|
}
|
|
|
|
class DetectorInvariance : public TestWithParam<String_FeatureDetector_Float_Float_t>
|
|
{
|
|
protected:
|
|
virtual void SetUp() {
|
|
// Read test data
|
|
const std::string filename = cvtest::TS::ptr()->get_data_path() + get<0>(GetParam());
|
|
image0 = imread(filename);
|
|
ASSERT_FALSE(image0.empty()) << "couldn't read input image";
|
|
|
|
featureDetector = get<1>(GetParam())();
|
|
minKeyPointMatchesRatio = get<2>(GetParam());
|
|
minInliersRatio = get<3>(GetParam());
|
|
}
|
|
|
|
Ptr<FeatureDetector> featureDetector;
|
|
float minKeyPointMatchesRatio;
|
|
float minInliersRatio;
|
|
Mat image0;
|
|
};
|
|
|
|
typedef DetectorInvariance DetectorScaleInvariance;
|
|
typedef DetectorInvariance DetectorRotationInvariance;
|
|
|
|
TEST_P(DetectorRotationInvariance, rotation)
|
|
{
|
|
Mat image1, mask1;
|
|
const int borderSize = 16;
|
|
Mat mask0(image0.size(), CV_8UC1, Scalar(0));
|
|
mask0(Rect(borderSize, borderSize, mask0.cols - 2*borderSize, mask0.rows - 2*borderSize)).setTo(Scalar(255));
|
|
|
|
vector<KeyPoint> keypoints0;
|
|
featureDetector->detect(image0, keypoints0, mask0);
|
|
EXPECT_GE(keypoints0.size(), 15u);
|
|
|
|
const int maxAngle = 360, angleStep = 15;
|
|
for(int angle = 0; angle < maxAngle; angle += angleStep)
|
|
{
|
|
Mat H = rotateImage(image0, mask0, static_cast<float>(angle), image1, mask1);
|
|
|
|
vector<KeyPoint> keypoints1;
|
|
featureDetector->detect(image1, keypoints1, mask1);
|
|
|
|
vector<DMatch> matches;
|
|
matchKeyPoints(keypoints0, H, keypoints1, matches);
|
|
|
|
int angleInliersCount = 0;
|
|
|
|
const float minIntersectRatio = 0.5f;
|
|
int keyPointMatchesCount = 0;
|
|
for(size_t m = 0; m < matches.size(); m++)
|
|
{
|
|
if(matches[m].distance < minIntersectRatio)
|
|
continue;
|
|
|
|
keyPointMatchesCount++;
|
|
|
|
// Check does this inlier have consistent angles
|
|
const float maxAngleDiff = 15.f; // grad
|
|
float angle0 = keypoints0[matches[m].queryIdx].angle;
|
|
float angle1 = keypoints1[matches[m].trainIdx].angle;
|
|
ASSERT_FALSE(angle0 == -1 || angle1 == -1) << "Given FeatureDetector is not rotation invariant, it can not be tested here.";
|
|
ASSERT_GE(angle0, 0.f);
|
|
ASSERT_LT(angle0, 360.f);
|
|
ASSERT_GE(angle1, 0.f);
|
|
ASSERT_LT(angle1, 360.f);
|
|
|
|
float rotAngle0 = angle0 + angle;
|
|
if(rotAngle0 >= 360.f)
|
|
rotAngle0 -= 360.f;
|
|
|
|
float angleDiff = std::max(rotAngle0, angle1) - std::min(rotAngle0, angle1);
|
|
angleDiff = std::min(angleDiff, static_cast<float>(360.f - angleDiff));
|
|
ASSERT_GE(angleDiff, 0.f);
|
|
bool isAngleCorrect = angleDiff < maxAngleDiff;
|
|
if(isAngleCorrect)
|
|
angleInliersCount++;
|
|
}
|
|
|
|
float keyPointMatchesRatio = static_cast<float>(keyPointMatchesCount) / keypoints0.size();
|
|
EXPECT_GE(keyPointMatchesRatio, minKeyPointMatchesRatio) << "angle: " << angle;
|
|
|
|
if(keyPointMatchesCount)
|
|
{
|
|
float angleInliersRatio = static_cast<float>(angleInliersCount) / keyPointMatchesCount;
|
|
EXPECT_GE(angleInliersRatio, minInliersRatio) << "angle: " << angle;
|
|
}
|
|
#if SHOW_DEBUG_LOG
|
|
std::cout
|
|
<< "angle = " << angle
|
|
<< ", keypoints = " << keypoints1.size()
|
|
<< ", keyPointMatchesRatio = " << keyPointMatchesRatio
|
|
<< ", angleInliersRatio = " << (keyPointMatchesCount ? (static_cast<float>(angleInliersCount) / keyPointMatchesCount) : 0)
|
|
<< std::endl;
|
|
#endif
|
|
}
|
|
}
|
|
|
|
TEST_P(DetectorScaleInvariance, scale)
|
|
{
|
|
vector<KeyPoint> keypoints0;
|
|
featureDetector->detect(image0, keypoints0);
|
|
EXPECT_GE(keypoints0.size(), 15u);
|
|
|
|
for(int scaleIdx = 1; scaleIdx <= 3; scaleIdx++)
|
|
{
|
|
float scale = 1.f + scaleIdx * 0.5f;
|
|
Mat image1;
|
|
resize(image0, image1, Size(), 1./scale, 1./scale, INTER_LINEAR_EXACT);
|
|
|
|
vector<KeyPoint> keypoints1, osiKeypoints1; // osi - original size image
|
|
featureDetector->detect(image1, keypoints1);
|
|
EXPECT_GE(keypoints1.size(), 15u);
|
|
EXPECT_LE(keypoints1.size(), keypoints0.size()) << "Strange behavior of the detector. "
|
|
"It gives more points count in an image of the smaller size.";
|
|
|
|
scaleKeyPoints(keypoints1, osiKeypoints1, scale);
|
|
vector<DMatch> matches;
|
|
// image1 is query image (it's reduced image0)
|
|
// image0 is train image
|
|
matchKeyPoints(osiKeypoints1, Mat(), keypoints0, matches);
|
|
|
|
const float minIntersectRatio = 0.5f;
|
|
int keyPointMatchesCount = 0;
|
|
int scaleInliersCount = 0;
|
|
|
|
for(size_t m = 0; m < matches.size(); m++)
|
|
{
|
|
if(matches[m].distance < minIntersectRatio)
|
|
continue;
|
|
|
|
keyPointMatchesCount++;
|
|
|
|
// Check does this inlier have consistent sizes
|
|
const float maxSizeDiff = 0.8f;//0.9f; // grad
|
|
float size0 = keypoints0[matches[m].trainIdx].size;
|
|
float size1 = osiKeypoints1[matches[m].queryIdx].size;
|
|
ASSERT_GT(size0, 0);
|
|
ASSERT_GT(size1, 0);
|
|
if(std::min(size0, size1) > maxSizeDiff * std::max(size0, size1))
|
|
scaleInliersCount++;
|
|
}
|
|
|
|
float keyPointMatchesRatio = static_cast<float>(keyPointMatchesCount) / keypoints1.size();
|
|
EXPECT_GE(keyPointMatchesRatio, minKeyPointMatchesRatio);
|
|
|
|
if(keyPointMatchesCount)
|
|
{
|
|
float scaleInliersRatio = static_cast<float>(scaleInliersCount) / keyPointMatchesCount;
|
|
EXPECT_GE(scaleInliersRatio, minInliersRatio);
|
|
}
|
|
#if SHOW_DEBUG_LOG
|
|
std::cout
|
|
<< "scale = " << scale
|
|
<< ", keyPointMatchesRatio = " << keyPointMatchesRatio
|
|
<< ", scaleInliersRatio = " << (keyPointMatchesCount ? static_cast<float>(scaleInliersCount) / keyPointMatchesCount : 0)
|
|
<< std::endl;
|
|
#endif
|
|
}
|
|
}
|
|
|
|
#undef SHOW_DEBUG_LOG
|
|
}} // namespace
|
|
|
|
namespace std {
|
|
using namespace opencv_test;
|
|
static inline void PrintTo(const String_FeatureDetector_Float_Float_t& v, std::ostream* os)
|
|
{
|
|
*os << "(\"" << get<0>(v)
|
|
<< "\", " << get<2>(v)
|
|
<< ", " << get<3>(v)
|
|
<< ")";
|
|
}
|
|
} // namespace
|