4.5 KiB
AKAZE and ORB planar tracking
@prev_tutorial{tutorial_akaze_matching} @next_tutorial{tutorial_homography}
Introduction
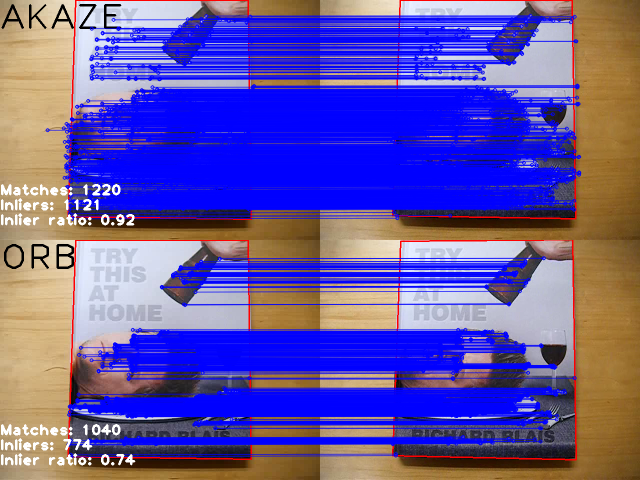
In this tutorial we will compare AKAZE and ORB local features using them to find matches between video frames and track object movements.
The algorithm is as follows:
- Detect and describe keypoints on the first frame, manually set object boundaries
- For every next frame: -# Detect and describe keypoints -# Match them using bruteforce matcher -# Estimate homography transformation using RANSAC -# Filter inliers from all the matches -# Apply homography transformation to the bounding box to find the object -# Draw bounding box and inliers, compute inlier ratio as evaluation metric
Data
To do the tracking we need a video and object position on the first frame.
You can download our example video and data from here.
To run the code you have to specify input (camera id or video_file). Then, select a bounding box with the mouse, and press any key to start tracking @code{.none} ./planar_tracking blais.mp4 @endcode
Source Code
@include cpp/tutorial_code/features2D/AKAZE_tracking/planar_tracking.cpp
Explanation
Tracker class
This class implements algorithm described abobve using given feature detector and descriptor matcher.
-
Setting up the first frame @code{.cpp} void Tracker::setFirstFrame(const Mat frame, vector bb, string title, Stats& stats) { first_frame = frame.clone(); (*detector)(first_frame, noArray(), first_kp, first_desc); stats.keypoints = (int)first_kp.size(); drawBoundingBox(first_frame, bb); putText(first_frame, title, Point(0, 60), FONT_HERSHEY_PLAIN, 5, Scalar::all(0), 4); object_bb = bb; } @endcode We compute and store keypoints and descriptors from the first frame and prepare it for the output.
We need to save number of detected keypoints to make sure both detectors locate roughly the same number of those.
-
Processing frames
-# Locate keypoints and compute descriptors @code{.cpp} (*detector)(frame, noArray(), kp, desc); @endcode
To find matches between frames we have to locate the keypoints first. In this tutorial detectors are set up to find about 1000 keypoints on each frame.-# Use 2-nn matcher to find correspondences @code{.cpp} matcher->knnMatch(first_desc, desc, matches, 2); for(unsigned i = 0; i < matches.size(); i++) { if(matches[i][0].distance < nn_match_ratio * matches[i][1].distance) { matched1.push_back(first_kp[matches[i][0].queryIdx]); matched2.push_back( kp[matches[i][0].trainIdx]); } } @endcode If the closest match is nn_match_ratio closer than the second closest one, then it's a match.
-# Use RANSAC to estimate homography transformation @code{.cpp} homography = findHomography(Points(matched1), Points(matched2), RANSAC, ransac_thresh, inlier_mask); @endcode If there are at least 4 matches we can use random sample consensus to estimate image transformation.
-# Save the inliers @code{.cpp} for(unsigned i = 0; i < matched1.size(); i++) { if(inlier_mask.at(i)) { int new_i = static_cast(inliers1.size()); inliers1.push_back(matched1[i]); inliers2.push_back(matched2[i]); inlier_matches.push_back(DMatch(new_i, new_i, 0)); } } @endcode Since findHomography computes the inliers we only have to save the chosen points and matches.
-# Project object bounding box @code{.cpp} perspectiveTransform(object_bb, new_bb, homography); @endcode
If there is a reasonable number of inliers we can use estimated transformation to locate the object.
Results
You can watch the resulting video on youtube.
AKAZE statistics: @code{.none} Matches 626 Inliers 410 Inlier ratio 0.58 Keypoints 1117 @endcode
ORB statistics: @code{.none} Matches 504 Inliers 319 Inlier ratio 0.56 Keypoints 1112 @endcode