QRCodeDetector: don't floodFill with outside-of-image seedPoint #23612Fixes#21532.
### Pull Request Readiness Checklist
See details at https://github.com/opencv/opencv/wiki/How_to_contribute#making-a-good-pull-request
- [X] I agree to contribute to the project under Apache 2 License.
- [X] To the best of my knowledge, the proposed patch is not based on a code under GPL or another license that is incompatible with OpenCV
- [X] The PR is proposed to the proper branch
- [X] There is a reference to the original bug report and related work
- [ ] There is accuracy test, performance test and test data in opencv_extra repository, if applicable
Patch to opencv_extra has the same branch name.
- [ ] The feature is well documented and sample code can be built with the project CMake
/build/build_cuda/3p/opencv/linux-x64/ubuntu22.04/Debug/modules/dnn/src/layers/cpu_kernels/convolution.cpp: In function 'void cv::dnn::packData8(char*&, float*&, int&, int&, int&, const int*, int, int, int)':
/build/build_cuda/3p/opencv/linux-x64/ubuntu22.04/Debug/modules/dnn/src/layers/cpu_kernels/convolution.cpp:448:43: error: 'CONV_NR' was not declared in this scope; did you mean 'CONV_3D'?
448 | vx_store(inpbufC_FP32 + k*CONV_NR, vx_load(inptrInC + k1));
| ^~~~~~~
| CONV_3D
Fix even input dimensions for INTER_NEAREST_EXACT #23634
### Pull Request Readiness Checklist
resolves https://github.com/opencv/opencv/issues/22204
related: https://github.com/opencv/opencv/issues/9096#issuecomment-1551306017
/cc @Yosshi999
See details at https://github.com/opencv/opencv/wiki/How_to_contribute#making-a-good-pull-request
- [x] I agree to contribute to the project under Apache 2 License.
- [x] To the best of my knowledge, the proposed patch is not based on a code under GPL or another license that is incompatible with OpenCV
- [x] The PR is proposed to the proper branch
- [x] There is a reference to the original bug report and related work
- [x] There is accuracy test, performance test and test data in opencv_extra repository, if applicable
Patch to opencv_extra has the same branch name.
- [x] The feature is well documented and sample code can be built with the project CMake
LSTM ONNX Layout Attribute Support #23614
### Explanation
This PR contains necessary changes to support `layout` attribute. This attributes is present in [ONNX](https://github.com/onnx/onnx/blob/main/docs/Operators.md#lstm) and [Torch](https://pytorch.org/docs/stable/generated/torch.nn.LSTM.html#lstm) (in touch it is name as `batch_first=True`) libraries. When `layout = 1` input to LSTM layer is expected to have batch dimension first -> `[batch_size, sequence_length, features]` vs `layout = 0` - default `[sequence_length, batch_size, features]`
### Test Data
Test data and data generator for PR located here [#1063](https://github.com/opencv/opencv_extra/pull/1063)
### Pull Request Readiness Checklist
See details at https://github.com/opencv/opencv/wiki/How_to_contribute#making-a-good-pull-request
- [x] I agree to contribute to the project under Apache 2 License.
- [x] To the best of my knowledge, the proposed patch is not based on a code under GPL or another license that is incompatible with OpenCV
- [x] The PR is proposed to the proper branch
- [ ] There is a reference to the original bug report and related work
- [x] There is accuracy test, performance test and test data in opencv_extra repository, if applicable
Patch to opencv_extra has the same branch name.
- [x] The feature is well documented and sample code can be built with the project CMake
videoio/FFmpeg: increased packet read attempt limit, allow configuring it
resolves#9455
related #3225
* Use different counters for wrong packets recieved by demuxer and errors from decoder
* Allow modifying these counters via environment variables `OPENCV_FFMPEG_READ_ATTEMPTS`/`OPENCV_FFMPEG_DECODE_ATTEMPTS`
* Added logging when reading breaks at one of error limits
Notes:
* I've been able to reproduce original issue with a video file with 14 total streams (video + audio + subtitles), at some point in the video only packets from the last stream are being sent by the demuxer, thus exceeding our limit. For my specific video total number of packets from wrong stream was about 2700. I've chosen 4096 as default value.
* Default limit of decoding attempts is quite low, because I'm not sure in which cases it can be exceeded (network stream?). I tried to read 8k video from the disk, but it did not cause break at decode point.
Build DNN without Protobuf
DNN module can be built without Protobuf for Darknet, TFLite, OpenVINO, Torch (not PyTorch) models.
```
cmake \
-DCMAKE_BUILD_TYPE=Release \
-DBUILD_LIST=dnn \
-DWITH_PROTOBUF=OFF \
-DWITH_OPENCL=OFF
7.1M lib/libopencv_dnn.so.4.7.0
```
```
cmake \
-DCMAKE_BUILD_TYPE=Release \
-DBUILD_LIST=dnn \
-DWITH_OPENCL=OFF
3.9M lib/libopencv_dnn.so.4.7.0
```
### Pull Request Readiness Checklist
See details at https://github.com/opencv/opencv/wiki/How_to_contribute#making-a-good-pull-request
- [x] I agree to contribute to the project under Apache 2 License.
- [x] To the best of my knowledge, the proposed patch is not based on a code under GPL or another license that is incompatible with OpenCV
- [x] The PR is proposed to the proper branch
- [x] There is a reference to the original bug report and related work
- [x] There is accuracy test, performance test and test data in opencv_extra repository, if applicable
Patch to opencv_extra has the same branch name.
- [x] The feature is well documented and sample code can be built with the project CMake
Improve document of cv::RotatedRect for #23335#23342fix#23335
### Pull Request Readiness Checklist
See details at https://github.com/opencv/opencv/wiki/How_to_contribute#making-a-good-pull-request
- [x] I agree to contribute to the project under Apache 2 License.
- [x] To the best of my knowledge, the proposed patch is not based on a code under GPL or another license that is incompatible with OpenCV
- [x] The PR is proposed to the proper branch
- [x] There is a reference to the original bug report and related work
- [x] There is accuracy test, performance test and test data in opencv_extra repository, if applicable
Patch to opencv_extra has the same branch name.
- [x] The feature is well documented and sample code can be built with the project CMake
don't ignore documentation for cv::format in doxygen #23555
Issue https://github.com/opencv/opencv/issues/23553
See details at https://github.com/opencv/opencv/wiki/How_to_contribute#making-a-good-pull-request
- [x] I agree to contribute to the project under Apache 2 License.
- [x] To the best of my knowledge, the proposed patch is not based on a code under GPL or another license that is incompatible with OpenCV
- [x] The PR is proposed to the proper branch
- [x] There is a reference to the original bug report and related work issue
- [x] There is accuracy test, performance test and test data in opencv_extra repository, if applicable
Patch to opencv_extra has the same branch name.
- [x] The feature is well documented and sample code can be built with the project CMake
AGP 8.0 build.gradle namespace and aidl buildFeature requirement added #23447
Hello,
Android Gradle Plugin version 8.0 is asking for namespace. This is become mandatory and after I update my AGP to 8.0, I got this error
```
Namespace not specified. Please specify a namespace in the module's build.gradle file like so:
android {
namespace 'com.example.namespace'
}
If the package attribute is specified in the source AndroidManifest.xml, it can be migrated automatically to the namespace value in the build.gradle file using the AGP Upgrade Assistant; please refer to https://developer.android.com/studio/build/agp-upgrade-assistant for more information.
```
This change fix this future releases. However I am not sure how opencv wants to user namespace I used "org.opencv" if there is a different namespace please let me know so I can changed that too. Also should I add namepsace into "opencv/modules/java/android_sdk/android_gradle_lib/build.gradle" here ?
### Sources
Android developer link: https://developer.android.com/studio/preview/features#namespace-dsl
Issue Tracker Google: https://issuetracker.google.com/issues/191813691?pli=1#comment19
### Pull Request Readiness Checklist
See details at https://github.com/opencv/opencv/wiki/How_to_contribute#making-a-good-pull-request
- [x] I agree to contribute to the project under Apache 2 License.
- [x] To the best of my knowledge, the proposed patch is not based on a code under GPL or another license that is incompatible with OpenCV
- [x] The PR is proposed to the proper branch
- [x] There is a reference to the original bug report and related work
- [ ] There is accuracy test, performance test and test data in opencv_extra repository, if applicable
Patch to opencv_extra has the same branch name.
- [ ] The feature is well documented and sample code can be built with the project CMake
Import and inference INT8 quantized TFLite model #23409
### Pull Request Readiness Checklist
* Support quantized TFLite models
* Enable fused activations (FP32, INT8)
**Merge with extra**: https://github.com/opencv/opencv_extra/pull/1048
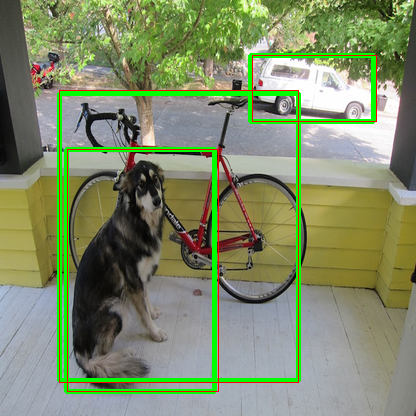
on the image, green boxes are from TFLite and red boxes from OpenCV
See details at https://github.com/opencv/opencv/wiki/How_to_contribute#making-a-good-pull-request
- [x] I agree to contribute to the project under Apache 2 License.
- [x] To the best of my knowledge, the proposed patch is not based on a code under GPL or another license that is incompatible with OpenCV
- [x] The PR is proposed to the proper branch
- [x] There is a reference to the original bug report and related work
- [x] There is accuracy test, performance test and test data in opencv_extra repository, if applicable
Patch to opencv_extra has the same branch name.
- [x] The feature is well documented and sample code can be built with the project CMake
Fix ONNX parser for single-layer LSTM hidden and cell states #23475
### Fix ONNX parser for single-layer LSTM hidden and cell states
### Pull Request Readiness Checklist
See details at https://github.com/opencv/opencv/wiki/How_to_contribute#making-a-good-pull-request
- [x] I agree to contribute to the project under Apache 2 License.
- [x] To the best of my knowledge, the proposed patch is not based on a code under GPL or another license that is incompatible with OpenCV
- [x] The PR is proposed to the proper branch
- [x] There is a reference to the original bug report and related work
- [x] There is accuracy test, performance test and test data in opencv_extra repository, if applicable
Patch to opencv_extra has the same branch name.
- [x] The feature is well documented and sample code can be built with the project CMake
This PR addresses #21118 [issue](https://github.com/opencv/opencv/issues/21118). The problem is that the ONNX parser is unable to read the hidden state and cell state for single-layer LSTMs. This PR fixes the issue by updating the parser to correctly read hidden and cell states.
DNN: Add New API blobFromImageParam #22750
The purpose of this PR:
1. Add new API `blobFromImageParam` to extend `blobFromImage` API. It can support the different data layout (NCHW or NHWC), and letter_box.
2. ~~`blobFromImage` can output `CV_16F`~~
### Pull Request Readiness Checklist
See details at https://github.com/opencv/opencv/wiki/How_to_contribute#making-a-good-pull-request
- [x] I agree to contribute to the project under Apache 2 License.
- [x] To the best of my knowledge, the proposed patch is not based on a code under GPL or another license that is incompatible with OpenCV
- [x] The PR is proposed to the proper branch
- [ ] There is a reference to the original bug report and related work
- [ ] There is accuracy test, performance test and test data in opencv_extra repository, if applicable
Patch to opencv_extra has the same branch name.
- [ ] The feature is well documented and sample code can be built with the project CMake
dnn: Support more operators in CANN backend #23401
This PR adds the support of following layers:
- [x] Sub
- [x] PRelu
- [x] DeConv
- [x] Also warn users if backend is switched back to default if some of the layers are not supported.
- [ ] [Dropped] LSTM: some hacks (adding layers) were introduced which makes it even harder to build the graph for CANN backend.
### Pull Request Readiness Checklist
See details at https://github.com/opencv/opencv/wiki/How_to_contribute#making-a-good-pull-request
- [x] I agree to contribute to the project under Apache 2 License.
- [x] To the best of my knowledge, the proposed patch is not based on a code under GPL or another license that is incompatible with OpenCV
- [x] The PR is proposed to the proper branch
- [x] There is a reference to the original bug report and related work
- [x] There is accuracy test, performance test and test data in opencv_extra repository, if applicable
Patch to opencv_extra has the same branch name.
- [x] The feature is well documented and sample code can be built with the project CMake
Added LSTM and GRU tests for various batch and input length sizes #23501
Added tests with various sequence length and batch sizes
Test data: https://github.com/opencv/opencv_extra/pull/1057
### Pull Request Readiness Checklist
See details at https://github.com/opencv/opencv/wiki/How_to_contribute#making-a-good-pull-request
- [x] I agree to contribute to the project under Apache 2 License.
- [x] To the best of my knowledge, the proposed patch is not based on a code under GPL or another license that is incompatible with OpenCV
- [x] The PR is proposed to the proper branch
- [ ] There is a reference to the original bug report and related work
- [x] There is accuracy test, performance test and test data in opencv_extra repository, if applicable
Patch to opencv_extra has the same branch name.
- [x] The feature is well documented and sample code can be built with the project CMake
* Replaced most remaining sprintf with snprintf
* Deprecated encodeFormat and introduced new method that takes the buffer length
* Also increased buffer size at call sites to be a little bigger, in case int is 64 bit
Added explicit cast to unsigned before doing the left shift.
This was caught by UBSan which reported things like:
drawing.cpp:361:22: runtime error: left shift of negative value -26214
drawing.cpp:383:22: runtime error: left shift of negative value -78642
Fix python bindings for setCharucoParameters #23436
setCharucoParameters fails in python
Fixes: https://github.com/opencv/opencv/issues/23440
### Pull Request Readiness Checklist
See details at https://github.com/opencv/opencv/wiki/How_to_contribute#making-a-good-pull-request
- [x] I agree to contribute to the project under Apache 2 License.
- [x] To the best of my knowledge, the proposed patch is not based on a code under GPL or another license that is incompatible with OpenCV
- [x] The PR is proposed to the proper branch
- [x] There is a reference to the original bug report and related work
- [x] There is accuracy test, performance test and test data in opencv_extra repository, if applicable
Patch to opencv_extra has the same branch name.
- [x] The feature is well documented and sample code can be built with the project CMake
Add scrollWheel to Cocoa #23394
### Pull Request Readiness Checklist
See details at https://github.com/opencv/opencv/wiki/How_to_contribute#making-a-good-pull-request
- [x] I agree to contribute to the project under Apache 2 License.
- [x] To the best of my knowledge, the proposed patch is not based on a code under GPL or another license that is incompatible with OpenCV
- [ ] The PR is proposed to the proper branch
- [ ] There is a reference to the original bug report and related work
- [ ] There is accuracy test, performance test and test data in opencv_extra repository, if applicable
Patch to opencv_extra has the same branch name.
- [ ] The feature is well documented and sample code can be built with the project CMake
Add notes for the output format of FaceDetectorYN.detect()
Resolves https://github.com/opencv/opencv/pull/23020#issuecomment-1499010015
### Pull Request Readiness Checklist
See details at https://github.com/opencv/opencv/wiki/How_to_contribute#making-a-good-pull-request
- [x] I agree to contribute to the project under Apache 2 License.
- [x] To the best of my knowledge, the proposed patch is not based on a code under GPL or another license that is incompatible with OpenCV
- [x] The PR is proposed to the proper branch
- [x] There is a reference to the original bug report and related work
- [ ] There is accuracy test, performance test and test data in opencv_extra repository, if applicable
Patch to opencv_extra has the same branch name.
- [x] The feature is well documented and sample code can be built with the project CMake
imgcodecs: tiff: Support to encode for CV_32S with compression params
Fix https://github.com/opencv/opencv/issues/23416
### Pull Request Readiness Checklist
See details at https://github.com/opencv/opencv/wiki/How_to_contribute#making-a-good-pull-request
- [x] I agree to contribute to the project under Apache 2 License.
- [x] To the best of my knowledge, the proposed patch is not based on a code under GPL or another license that is incompatible with OpenCV
- [x] The PR is proposed to the proper branch
- [x] There is a reference to the original bug report and related work
- [x] There is accuracy test, performance test and test data in opencv_extra repository, if applicable
Patch to opencv_extra has the same branch name.
- [ ] The feature is well documented and sample code can be built with the project CMake
Fix identifying initializers in ONNX graph simplification #23296
Fixes https://github.com/opencv/opencv/issues/23295
### Pull Request Readiness Checklist
See details at https://github.com/opencv/opencv/wiki/How_to_contribute#making-a-good-pull-request
- [x] I agree to contribute to the project under Apache 2 License.
- [x] To the best of my knowledge, the proposed patch is not based on a code under GPL or another license that is incompatible with OpenCV
- [x] The PR is proposed to the proper branch
- [x] There is a reference to the original bug report and related work
- [x] There is accuracy test, performance test and test data in opencv_extra repository, if applicable
Patch to opencv_extra has the same branch name.
- [x] The feature is well documented and sample code can be built with the project CMake
**Merge with extra**: https://github.com/opencv/opencv_extra/pull/1050
For 32 bits per pixel with 3 or 4 channel destination images, apply scale factor and mask to parse BMP files correctly
closes#23445
### Pull Request Readiness Checklist
- [x] I agree to contribute to the project under Apache 2 License.
- [x] To the best of my knowledge, the proposed patch is not based on a code under GPL or another license that is incompatible with OpenCV
- [x] The PR is proposed to the proper branch
- [x] There is a reference to the original bug report and related work
- [x] There is accuracy test, performance test and test data in opencv_extra repository, if applicable
Patch to opencv_extra has the same branch name.
- [ ] The feature is well documented and sample code can be built with the project CMake
Add multiview calibration [GSOC 2022]
### Pull Request Readiness Checklist
- [x] I agree to contribute to the project under Apache 2 License.
- [x] To the best of my knowledge, the proposed patch is not based on a code under GPL or another license that is incompatible with OpenCV
- [x] The PR is proposed to the proper branch
- [x] There is a reference to the original bug report and related work
- [x] There is accuracy test, performance test and test data in opencv_extra repository, if applicable
Patch to opencv_extra has the same branch name.
- [x] The feature is well documented and sample code can be built with the project CMake
The usage tutorial is on Google Docs following this link: https://docs.google.com/document/d/1k6YpD0tpSVqnVnvU2nzE34K3cp_Po6mLWqXV06CUHwQ/edit?usp=sharing
This makes LineSegmentDetector deterministic by using stable_sort for ordering points by norm. Without this change the region growing in LSD is non-determinstic and thus the returned lines are changing between invocations.
This is a replacement for https://github.com/opencv/opencv/pull/23370
Propagate inputs info for ONNX and TFLite models
### Pull Request Readiness Checklist
Needed for generic applications such as benchmarking pipelines. So OpenCV can tell about the default input shapes specified in the models.
See details at https://github.com/opencv/opencv/wiki/How_to_contribute#making-a-good-pull-request
- [x] I agree to contribute to the project under Apache 2 License.
- [x] To the best of my knowledge, the proposed patch is not based on a code under GPL or another license that is incompatible with OpenCV
- [x] The PR is proposed to the proper branch
- [x] There is a reference to the original bug report and related work
- [x] There is accuracy test, performance test and test data in opencv_extra repository, if applicable
Patch to opencv_extra has the same branch name.
- [x] The feature is well documented and sample code can be built with the project CMake
Support VideoCapture CAP_PROP_AUTO_WB and CV_CAP_PROP_WHITE_BALANCE_BLUE_U for DShow
### Pull Request Readiness Checklist
See details at https://github.com/opencv/opencv/wiki/How_to_contribute#making-a-good-pull-request
- [OK] I agree to contribute to the project under Apache 2 License.
- [OK] To the best of my knowledge, the proposed patch is not based on a code under GPL or another license that is incompatible with OpenCV
- [OK] The PR is proposed to the proper branch
- [OK] There is a reference to the original bug report and related work
https://github.com/opencv/opencv/issues/19621https://github.com/opencv/opencv/issues/21408
### Before apply this pull request console output.
before AWB setting
CAP_PROP_WHITE_BALANCE_BLUE_U: 2000
CAP_PROP_AUTO_WB: -1
after AWB disable setting
CAP_PROP_WHITE_BALANCE_BLUE_U: 2000
CAP_PROP_AUTO_WB: -1
after AWB enable setting
CAP_PROP_WHITE_BALANCE_BLUE_U: 2000
CAP_PROP_AUTO_WB: -1
after Manual WB(and Disable AWB) setting
CAP_PROP_WHITE_BALANCE_BLUE_U: 2000
CAP_PROP_AUTO_WB: -1
### After apply this pull request console output.
before AWB setting
CAP_PROP_WHITE_BALANCE_BLUE_U: 2000
CAP_PROP_AUTO_WB: 0
after AWB disable setting
CAP_PROP_WHITE_BALANCE_BLUE_U: 4000
CAP_PROP_AUTO_WB: 0
after AWB enable setting
CAP_PROP_WHITE_BALANCE_BLUE_U: 4000
CAP_PROP_AUTO_WB: 1
after Manual WB(and Disable AWB) setting
CAP_PROP_WHITE_BALANCE_BLUE_U: 2000
CAP_PROP_AUTO_WB: 0
### Test Code
[OpenCvVideoCapTest.zip](https://github.com/opencv/opencv/files/10825399/OpenCvVideoCapTest.zip)
Added argument to print notice in `roiSelector.cpp`
Related Issue : https://github.com/opencv/opencv/issues/23175
I've added a printNotice argument to `selectROI` (and it's overload) and `selectROIs` functions.
I've also updated the function declarations in `highgui.hpp`.
Tested by building locally.
### Pull Request Readiness Checklist
See details at https://github.com/opencv/opencv/wiki/How_to_contribute#making-a-good-pull-request
- [x] I agree to contribute to the project under Apache 2 License.
- [x] To the best of my knowledge, the proposed patch is not based on a code under GPL or another license that is incompatible with OpenCV
- [x] The PR is proposed to the proper branch
- [x] There is a reference to the original bug report and related work
- [ ] There is accuracy test, performance test and test data in opencv_extra repository, if applicable
Patch to opencv_extra has the same branch name.
- [x] The feature is well documented and sample code can be built with the project CMake
Merge with https://github.com/opencv/opencv_contrib/pull/3446
Related issue: https://github.com/opencv/opencv/issues/11810
### Pull Request Readiness Checklist
See details at https://github.com/opencv/opencv/wiki/How_to_contribute#making-a-good-pull-request
- [x] I agree to contribute to the project under Apache 2 License.
- [x] To the best of my knowledge, the proposed patch is not based on a code under GPL or another license that is incompatible with OpenCV
- [x] The PR is proposed to the proper branch
- [x] There is a reference to the original bug report and related work
- [x] There is accuracy test, performance test and test data in opencv_extra repository, if applicable
Patch to opencv_extra has the same branch name.
- [x] The feature is well documented and sample code can be built with the project CMake
Fixed potential memory leak in flann
Issue #22426
### Pull Request Readiness Checklist
See details at https://github.com/opencv/opencv/wiki/How_to_contribute#making-a-good-pull-request
- [x] I agree to contribute to the project under Apache 2 License.
- [x] To the best of my knowledge, the proposed patch is not based on a code under GPL or another license that is incompatible with OpenCV
- [x] The PR is proposed to the proper branch
- [x] There is a reference to the original bug report and related work
- [x] There is accuracy test, performance test and test data in opencv_extra repository, if applicable
Patch to opencv_extra has the same branch name.
- [x] The feature is well documented and sample code can be built with the project CMake
4 failed tests in open_test_dnn listed below:
* Test_Caffe_layers.Conv_Elu/0, where GetParam() = OCV/CPU
* Test_ONNX_layers.ConvResizePool1d/0, where GetParam() = OCV/CPU
* Test_TensorFlow_layers.tf_reshape_nhwc/0, where GetParam() = OCV/CPU
* Test_Torch_layers.net_inception_block/0, where GetParam() = OCV/CPU
In winofunc_AtXA_8x8_f32 and winofunc_BtXB_8x8_f32
implementation, incorrect input parameters cause tests failure.
Add four new different variables for the last four input parameters of
v_transpose4x4 to fix bugs, and update related comments.
Signed-off-by: tingbo.liao <tingbo.liao@starfivetech.com>
Related issue: https://github.com/opencv/opencv_zoo/issues/136
Features added:
- Support operators with multiple output: ONNX Split.
- Support Slice without steps.
Bugs fixed:
- Wrong settings in ClipByValue (Relu6).
- Wrong calculation of pads in convolution layer (It is wrong generally but only fixed specifically for CANN for now).
### Pull Request Readiness Checklist
See details at https://github.com/opencv/opencv/wiki/How_to_contribute#making-a-good-pull-request
- [x] I agree to contribute to the project under Apache 2 License.
- [x] To the best of my knowledge, the proposed patch is not based on a code under GPL or another license that is incompatible with OpenCV
- [x] The PR is proposed to the proper branch
- [x] There is a reference to the original bug report and related work
- [x] There is accuracy test, performance test and test data in opencv_extra repository, if applicable
Patch to opencv_extra has the same branch name.
- [x] The feature is well documented and sample code can be built with the project CMake
Fixed strict type in slerp and spline; Fixed nlerp usage condition
Fixes#23293
The PR is fixing the issue described in [Issue #23293 ](https://github.com/opencv/opencv/issues/23293)
- [X] I agree to contribute to the project under Apache 2 License.
- [X] To the best of my knowledge, the proposed patch is not based on a code under GPL or another license that is incompatible with OpenCV
- [X] The PR is proposed to the proper branch
- [X] There is a reference to the original bug report and related work
- [X] There is accuracy test, performance test and test data in opencv_extra repository, if applicable
Patch to opencv_extra has the same branch name.
- [X] The feature is well documented and sample code can be built with the project CMake
Resolves https://github.com/opencv/opencv/issues/23304
Fixes the incorrect pixel grid
Switches type to double to avoid precision loss as all callers use doubles
### Pull Request Readiness Checklist
See details at https://github.com/opencv/opencv/wiki/How_to_contribute#making-a-good-pull-request
- [X] I agree to contribute to the project under Apache 2 License.
- [X] To the best of my knowledge, the proposed patch is not based on a code under GPL or another license that is incompatible with OpenCV
- [X] The PR is proposed to the proper branch
- [X] There is a reference to the original bug report and related work
- [X] There is accuracy test, performance test and test data in opencv_extra repository, if applicable
Patch to opencv_extra has the same branch name.
- [X] The feature is well documented and sample code can be built with the project CMake
In case of huge (and probably invalid) input, make sure we do not
rely only on the while loops for truncation.
### Pull Request Readiness Checklist
See details at https://github.com/opencv/opencv/wiki/How_to_contribute#making-a-good-pull-request
- [x] I agree to contribute to the project under Apache 2 License.
- [x] To the best of my knowledge, the proposed patch is not based on a code under GPL or another license that is incompatible with OpenCV
- [x] The PR is proposed to the proper branch
Make the GTK+3 API the default one by wrapping the missing GTK+2 functions in defines
Make sure to always guard with GTK_VERSION2 or GTK_VERSION3 to allow future addition
of Gtk4
* different interpolation by double image
* fixing scaling mapping
* fixing a test
* added an option to enable previous interpolation
* added doxygen entries for the new parameter
* ASSERT_TRUE -> ASSERT_EQ
* changed log message when using old upscale mode
Fix misaligned-pointer-use in intrin_sse.hpp
* Fix misaligned-pointer-use in intrin_sse.hpp
* Use _mm_loadu_si32() instead of memcpy()
* Use CV_DECL_ALIGNED instead of _mm_loadu_si32()
Fix rect_nfa (lsd)
* Fix missing log_gamma in nfa()
Comparing the nfa function with the function in the binomial_nfa repository (https://github.com/rafael-grompone-von-gioi/binomial_nfa/blob/main/C99/log_binomial_nfa.c#L152), the first log_gamma call is missing.
* Fix rect_nfa pixel index
* Replace std::rotate
* Rename tmp to v_tmp
* Replace auto and std::min_element
* Change slope equality check to int
* Fix left limit check
### Changes
* Port of #22519 to 5.x
* Distortion coefficients were not copied properly, fixed
* Minor coding style chages
### Pull Request Readiness Checklist
See details at https://github.com/opencv/opencv/wiki/How_to_contribute#making-a-good-pull-request
- [x] I agree to contribute to the project under Apache 2 License.
- [x] To the best of my knowledge, the proposed patch is not based on a code under GPL or another license that is incompatible with OpenCV
- [x] The PR is proposed to the proper branch
- [x] There is a reference to the original bug report and related work
- [x] There is accuracy test, performance test and test data in opencv_extra repository, if applicable
Patch to opencv_extra has the same branch name.
- [x] The feature is well documented and sample code can be built with the project CMake
dnn: add layer normalization for vision transformers
* add layer norm onnx parser, impl and tests
* add onnx graph simplifier for layer norm expanded
* handle the case when constants are of type Initializer
* add test case for layer norm expanded with initializers
* use CV_Assert & CV_CheckType in place of CV_Assert_N; use forward_fallback for OCL_FP16
* use const ref / ref in parameters of invoker::run; extract inner const if from nested loop; use size_t in place of ull
* template hasBias
* remove trailing whitespace
* use pointer parameter with null check; move normSize division & mean_square division outside of loop; use std::max to ensure positive value before std::sqrt
* refactor implementation, optimize parallel_for
* disable layer norm expanded
* remove the removal of layer norm optional outputs
Omit the first check of the double-checked locking pattern in
recordException() in parallel.cpp when CV_THREAD_SANITIZER is defined.
This should only slow recordException() down when the thread sanitizer
is used, and avoids the TSAN data race warning.
Fixes#23057
Parameter uncertainty fixed + ground truth test data fixed
### Pull Request Readiness Checklist
See details at https://github.com/opencv/opencv/wiki/How_to_contribute#making-a-good-pull-request
- [x] I agree to contribute to the project under Apache 2 License.
- [x] To the best of my knowledge, the proposed patch is not based on a code under GPL or another license that is incompatible with OpenCV
- [x] The PR is proposed to the proper branch
- [x] There is a reference to the original bug report and related work
- [x] There is accuracy test, performance test and test data in opencv_extra repository, if applicable
Patch to opencv_extra has the same branch name.
- [x] The feature is well documented and sample code can be built with the project CMake
Adding HEVC/H265 FourCC support to MSMF video writer
* Adding HEVC/H265 fourcc to MSMF video writer
Adding HEVC/H265 fourcc to MSMF video writer. I have verified it with my own video input stream, and it works well on my workstation.
* Update video io testing
* Adding macro fence to get rid of compiler error
H265/HEVC encoder is only available in Windows or later. https://learn.microsoft.com/en-us/windows/win32/medfound/h-265---hevc-video-encoder
* Update test_video_io.cpp
Backport of #22992 to 3.4
### Pull Request Readiness Checklist
See details at https://github.com/opencv/opencv/wiki/How_to_contribute#making-a-good-pull-request
- [x] I agree to contribute to the project under Apache 2 License.
- [x] To the best of my knowledge, the proposed patch is not based on a code under GPL or another license that is incompatible with OpenCV
- [x] The PR is proposed to the proper branch
- [x] There is a reference to the original bug report and related work
- [x] There is accuracy test, performance test and test data in opencv_extra repository, if applicable
Patch to opencv_extra has the same branch name.
- [x] The feature is well documented and sample code can be built with the project CMake
Add `estimateSE2(...)`, `estimateSE3(...)`, `estimateSIM2(...)`, `estimateSIM3(...)` for estimating an geometric transformation with rotation and translation (with scaling for SIM) using USAC: as alternative for `estimateAffinePartial2D` and `estimateAffine3D`.
Modified test module.
Remove unused variables.
Remove initializer of unused variable.
Add interfaces to accept UsacParams() and corresponding test codes.
Revise test code.
PartialNd removed
Umeyama rewritten for code quality & speed
comments & minors
rise number of points
fix, and +30% faster!
only one number should be that big
remove USAC code, leave fix only
big number
* fix openmp include and link issue on macos
* turn off have_openmp if OpenMP_CXX_INCLUDE_DIRS is empty
* test commit
* use condition HAVE_OPENMP and OpenMP_CXX_LIBRARIES for linking
* remove trailing whitespace
* remove notes
* update conditions
* use OpenMP_CXX_LIBRARIES for linking
Fix broken paper link for fastNlMeansDenoising
* Fix broken link
* Move citation to `opencv.bib`
* Cite researchgate reference
* Correct citation label
* Use semantic scholar BibTex
Use reinterpret instead of c-style casting for GCC
Co-authored-by: Xu Zhang <xu.zhang@hexintek.com>
Co-authored-by: Maksim Shabunin <maksim.shabunin@gmail.com>
Usage of imread(): magic number 0, unchecked result
* docs: rewrite 0/1 to IMREAD_GRAYSCALE/IMREAD_COLOR in imread()
* samples, apps: rewrite 0/1 to IMREAD_GRAYSCALE/IMREAD_COLOR in imread()
* tests: rewrite 0/1 to IMREAD_GRAYSCALE/IMREAD_COLOR in imread()
* doc/py_tutorials: check imread() result
merge with https://github.com/opencv/opencv_contrib/pull/3394
move Charuco API from contrib to main repo:
- add CharucoDetector:
```
CharucoDetector::detectBoard(InputArray image, InputOutputArrayOfArrays markerCorners, InputOutputArray markerIds,
OutputArray charucoCorners, OutputArray charucoIds) const // detect charucoCorners and/or markerCorners
CharucoDetector::detectDiamonds(InputArray image, InputOutputArrayOfArrays _markerCorners,
InputOutputArrayOfArrays _markerIds, OutputArrayOfArrays _diamondCorners,
OutputArray _diamondIds) const
```
- add `matchImagePoints()` for `CharucoBoard`
- remove contrib aruco dependencies from interactive-calibration tool
- move almost all aruco tests to objdetect
### Pull Request Readiness Checklist
See details at https://github.com/opencv/opencv/wiki/How_to_contribute#making-a-good-pull-request
- [x] I agree to contribute to the project under Apache 2 License.
- [x] To the best of my knowledge, the proposed patch is not based on a code under GPL or another license that is incompatible with OpenCV
- [x] The PR is proposed to the proper branch
- [x] There is a reference to the original bug report and related work
- [x] There is accuracy test, performance test and test data in opencv_extra repository, if applicable
Patch to opencv_extra has the same branch name.
- [x] The feature is well documented and sample code can be built with the project CMake
Switch to new OpenVINO API after 2022.1 release
* Pass Layer_Test_Convolution_DLDT.Accuracy/0 test
* Pass test Test_Caffe_layers.Softmax
* Failed 136 tests
* Fix Concat. Failed 120 tests
* Custom nGraph ops. 19 failed tests
* Set and get properties from Core
* Read model from buffer
* Change MaxPooling layer output names. Restore reshape
* Cosmetic changes
* Cosmetic changes
* Override getOutputsInfo
* Fixes for OpenVINO < 2022.1
* Async inference for 2021.4 and less
* Compile model with config
* Fix serialize for 2022.1
* Asynchronous inference with 2022.1
* Handle 1d outputs
* Work with model with dynamic output shape
* Fixes with 1d output for old API
* Control outputs by nGraph function for all OpenVINO versions
* Refer inputs in PrePostProcessor by indices
* Fix cycled dependency between InfEngineNgraphNode and InfEngineNgraphNet.
Add InferRequest callback only for async inference. Do not capture InferRequest object.
* Fix tests thresholds
* Fix HETERO:GPU,CPU plugin issues with unsupported layer
This change replaces references to a number of deprecated NumPy
type aliases (np.bool, np.int, np.float, np.complex, np.object,
np.str) with their recommended replacement (bool, int, float,
complex, object, str).
Those types were deprecated in 1.20 and are removed in 1.24,
cf https://github.com/numpy/numpy/pull/22607.
Parallelize implementation of HDR MergeMertens.
* Parallelize MergeMertens.
* Added performance tests for HDR.
* Ran clang-format.
* Optimizations.
* Fix data path for Windows.
* Remove compiiation warning on Windows.
* Remove clang-format for existing file.
* Addressing reviewer comments.
* Ensure correct summation order.
* Add test for determinism.
* Move result pyramid into sync struct.
* Reuse sync for first loop as well.
* Use OpenCV's threading primitives.
* Remove cout.
**Merge with contrib**: https://github.com/opencv/opencv_contrib/pull/3003
### Pull Request Readiness Checklist
See details at https://github.com/opencv/opencv/wiki/How_to_contribute#making-a-good-pull-request
- [x] I agree to contribute to the project under Apache 2 License.
- [x] To the best of my knowledge, the proposed patch is not based on a code under GPL or other license that is incompatible with OpenCV
- [x] The PR is proposed to proper branch
- [ ] There is reference to original bug report and related work
- [x] There is accuracy test, performance test and test data in opencv_extra repository, if applicable
Patch to opencv_extra has the same branch name.
- [ ] The feature is well documented and sample code can be built with the project CMake
* cann backend impl v1
* cann backend impl v2: use opencv parsers to build models for cann
* adjust fc according to the new transA and transB
* put cann net in cann backend node and reuse forwardLayer
* use fork() to create a child process and compile cann model
* remove legacy code
* remove debug code
* fall bcak to CPU backend if there is one layer not supoorted by CANN backend
* fix netInput forward
G-API: replace GAPI_Assert() with 'false' and '0' to GAPI_Error()
* gapi: GAPI_Error() macro
* gapi: replace GAPI_Assert() with 'false' and '0' to GAPI_Error()
* build: eliminate 'unreachable code' after CV_Error() (MSVC 2015)
* build: eliminate 'unreachable code' warning for MSVS 2015/2017
- observed in constructors stubs with throwing exception
Megre together with https://github.com/opencv/opencv_contrib/pull/3325
1. Move aruco_detector, aruco_board, aruco_dictionary, aruco_utils to objdetect
1.1 add virtual Board::draw(), virtual ~Board()
1.2 move `testCharucoCornersCollinear` to Board classes (and rename to `checkCharucoCornersCollinear`)
1.3 add wrappers to keep the old api working
3. Reduce inludes
4. Fix java tests (add objdetect import)
5. Refactoring
### Pull Request Readiness Checklist
See details at https://github.com/opencv/opencv/wiki/How_to_contribute#making-a-good-pull-request
- [x] I agree to contribute to the project under Apache 2 License.
- [x] To the best of my knowledge, the proposed patch is not based on a code under GPL or another license that is incompatible with OpenCV
- [x] The PR is proposed to the proper branch
- [x] There is a reference to the original bug report and related work
- [x] There is accuracy test, performance test and test data in opencv_extra repository, if applicable
Patch to opencv_extra has the same branch name.
- [x] The feature is well documented and sample code can be built with the project CMake
```
**WIP**
force_builders=linux,win64,docs,Linux x64 Debug,Custom
Xbuild_contrib:Docs=OFF
build_image:Custom=ubuntu:22.04
build_worker:Custom=linux-1
```
videoio: add Orbbec Gemini 2 and Astra 2 camera support
### Test Result
| OS | Compiler | Camera | Result |
|-----|-----------|---------|--------|
|Windows11| (VS2022)MSVC17.3|Orbbec Gemini 2|Pass|
|Windows11| (VS2022)MSVC17.3|Orbbec Astra 2|Pass|
|Ubuntu22.04|GCC9.2|Orbbec Gemini 2|Pass|
|Ubuntu22.04|GCC9.2|Orbbec Astra 2|Pass|
### Pull Request Readiness Checklist
- [x] I agree to contribute to the project under Apache 2 License.
- [x] To the best of my knowledge, the proposed patch is not based on a code under GPL or another license that is incompatible with OpenCV
- [x] The PR is proposed to the proper branch
- [x] The feature is well documented and sample code can be built with the project CMake
Address https://github.com/opencv/opencv/issues/22868
Used the same defaults as it's done for FFmpeg
### Pull Request Readiness Checklist
See details at https://github.com/opencv/opencv/wiki/How_to_contribute#making-a-good-pull-request
- [x] I agree to contribute to the project under Apache 2 License.
- [x] To the best of my knowledge, the proposed patch is not based on a code under GPL or another license that is incompatible with OpenCV
- [x] The PR is proposed to the proper branch
- [x] There is a reference to the original bug report and related work
- [ ] There is accuracy test, performance test and test data in opencv_extra repository, if applicable
Patch to opencv_extra has the same branch name.
- [ ] The feature is well documented and sample code can be built with the project CMake
```
force_builders=Custom
build_image:Custom=gstreamer:16.04
buildworker:Custom=linux-1
```
Add Python bindings for VideoCapture::waitAny #21826
### Pull Request Readiness Checklist
See details at https://github.com/opencv/opencv/wiki/How_to_contribute#making-a-good-pull-request
- [x] I agree to contribute to the project under Apache 2 License.
- [x] To the best of my knowledge, the proposed patch is not based on a code under GPL or another license that is incompatible with OpenCV
- [x] The PR is proposed to the proper branch
- [x] There is a reference to the original bug report and related work
- [x] There is accuracy test, performance test and test data in opencv_extra repository, if applicable
Patch to opencv_extra has the same branch name.
- [x] The feature is well documented and sample code can be built with the project CMake
Fixes#22799
Replaces #21559 which was taken as a base
Connected PR in contrib: [#3388@contrib](https://github.com/opencv/opencv_contrib/pull/3388)
### Changes
OK, now this is more Odometry-related PR than Volume-related. Anyway,
* `Volume` class gets wrapped
* The same was done for helper classes like `VolumeSettings`, `OdometryFrame` and `OdometrySettings`
* `OdometryFrame` constructor signature changed to more convenient where depth goes on 1st place, RGB image on 2nd.
This works better for depth-only `Odometry` algorithms.
* `OdometryFrame` is checked for amount of pyramid layers inside `Odometry::compute()`
* `Odometry` was fully wrapped + more docs added
* Added Python tests for `Odometry`, `OdometryFrame` and `Volume`
* Added Python sample for `Volume`
* Minor fixes including better var names
### Pull Request Readiness Checklist
See details at https://github.com/opencv/opencv/wiki/How_to_contribute#making-a-good-pull-request
- [x] I agree to contribute to the project under Apache 2 License.
- [x] To the best of my knowledge, the proposed patch is not based on a code under GPL or another license that is incompatible with OpenCV
- [x] The PR is proposed to the proper branch
- [x] There is a reference to the original bug report and related work
- [x] There is accuracy test, performance test and test data in opencv_extra repository, if applicable
Patch to opencv_extra has the same branch name.
- [x] The feature is well documented and sample code can be built with the project CMake
DNN: reduce the memory used in convolution layer
* reduce the memory in winograd and disabel the test when usage memory is larger than 2gb.
* remove VERY_LOG tag
### Changes
* Duplicated code removal in TSDF tests by implementing them with fixtures and GTest params
* e.g. separate OCL tests file removed
* as a result, more test cases are covered
* the same's done for perf tests
### Pull Request Readiness Checklist
See details at https://github.com/opencv/opencv/wiki/How_to_contribute#making-a-good-pull-request
- [x] I agree to contribute to the project under Apache 2 License.
- [x] To the best of my knowledge, the proposed patch is not based on a code under GPL or another license that is incompatible with OpenCV
- [x] The PR is proposed to the proper branch
- [x] There is a reference to the original bug report and related work
- [x] There is accuracy test, performance test and test data in opencv_extra repository, if applicable
Patch to opencv_extra has the same branch name.
- [x] The feature is well documented and sample code can be built with the project CMake
[teset data in opencv_extra](https://github.com/opencv/opencv_extra/pull/1016)
NanoTrack is an extremely lightweight and fast object-tracking model.
The total size is **1.1 MB**.
And the FPS on M1 chip is **150**, on Raspberry Pi 4 is about **30**. (Float32 CPU only)
With this model, many users can run object tracking on the edge device.
The author of NanoTrack is @HonglinChu.
The original repo is https://github.com/HonglinChu/NanoTrack.
### Pull Request Readiness Checklist
See details at https://github.com/opencv/opencv/wiki/How_to_contribute#making-a-good-pull-request
- [x] I agree to contribute to the project under Apache 2 License.
- [x] To the best of my knowledge, the proposed patch is not based on a code under GPL or another license that is incompatible with OpenCV
- [x] The PR is proposed to the proper branch
- [ ] There is a reference to the original bug report and related work
- [ ] There is accuracy test, performance test and test data in opencv_extra repository, if applicable
Patch to opencv_extra has the same branch name.
- [ ] The feature is well documented and sample code can be built with the project CMake
The current implementation overwrites the result rotation and translation in every iteration.
If SOLVEPNP_ITERATIVE was run as a refinement it will start from the incorrect initial
transformation thus degrading the final outcome.
The old documentation implies that the call is only valid for the next parallel region and must be called again if addtional regions should be affected as well.
Modify the SIMD loop in color_hsv.
* Modify the SIMD loops in color_hsv.
* Add FP supporting in bit logic.
* Add temporary compatibility code.
* Use max_nlanes instead of vlanes for array declaration.
* Use "CV_SIMD || CV_SIMD_SCALABLE".
* Revert the modify of the Universal Intrinsic API
* Fix warnings.
* Use v_select instead of bits manipulation.
Corresponding contrib PR: #3382@contrib
Changes
- Volume::raycast(): camera intrinsics can be explicitly passed to the function. If not, the ones from current volume settings are used
- getVolumeDimensions() renamed to getVolumeStrides() because they are strides actually
- TSDF tests: OpenCLStatusRevert and parametrized fixture
- ColorTSDF::integrate(): extra RGB projector is redundant, removed
- Minor changes
This PR contains:
- a new property enableGrowth which controls should the HashTSDF be extended during integration by adding new volume units or not
- a new method getBoundingBox which calculates the size of currently occupied data
- a set of tests to check that new functionality
- a fix for TSDF GPU reset (data is correctly zeroed now using floatToTsdf() function)
minor changes
There's a bug which appears when volume pose contains non-trivial rotation.
It results in wrong depth integration which can be observed during raycasting
or points/normals export.
- This PR fixes the bug for both CPU and OpenCL
- There is a reproducer for the bug
- The copy behavior of VolumeSettings fixed (now copy constructor creates a deep copy)
- Minor changes (e.g. unused vars removed)
Minor refactoring
Partially address review comments
Move DX-related stuff from the sample to a default source
Simplify the default OneVPL config
Address minor review comments
Add class for the default VPL source
WIP: Add initial stub for tests with description
Removing default vpl source and minor refactoring
Refactor default files
Fix build and application crash
Address review comments
Add test on VPL + OCL interaction compared to CPU behavior
Fix test
Introduce libavdevice to make v4l2 available to the ffmpeg backend
* introduce libavdevice to make v4l2 available to the ffmpeg backend
* downgrade the min required libavdevice version to 53.2.0
* make libavdevice optional
* create OCV_OPTION OPENCV_FFMPEG_ENABLE_LIBAVDEVICE and add definition through ocv_add_external_target
* move OCV_OPTION 'OPENCV_FFMPEG_ENABLE_LIBAVDEVICE' to detect_ffmpeg.cmake
OpenEXR encoder: add capability to set the DWA compression level
* OpenEXR encoder: add capability to set the DWA compression level from outside
* Do not try to call `header.dwaCompressionLevel()` if OpenEXR is not version 3 or later
* Minor cleanup
DNN: let Quant and Dequant of ONNX_importer support the Constant input.
* let Quant and Dequant support the Constant input.
* fix negative value of axis.
Complement PR: #3366@contrib
Changes
OdometryFrame losts its getters: a user can provide data at construction stage only, pyramids and other generated data is read-only now
OdometryFrame is based on UMats: no TMat templates inside, CPU operations are done with UMat::getMat() method, chaining issues are solved ad-hoc
No more Odometry::createOdometryFrame() method, frames are compatible with all odometry algorithms
Normals computer is cached inside Odometry and exposed to API as well as its settings
Volume::raycast() won't return the result in OdometryFrame anymore
Added test for Odometry::prepareFrame*() & other test fixes
Minor code improvements
TODOs:
fix TODOs in code
lower acceptable accuracy errors
Setting CAP_PROP_AUTO_EXPOSURE on VideoCapture with backend DSHOW does not change anything. Now with this implementation the property can be used with value 1 for availability.
added blob contours to blob detector
* added blob contours
* Fixed Java regression test after new parameter addition to SimpleBlobDetector.
* Added stub implementation of SimpleBlobDetector::getBlobContours to presume source API compatibility.
* cmake: Fix DirectX detection in mingw
The pragma comment directive is valid for MSVC only. So, the DirectX detection
fails in mingw. The failure is fixed by adding the required linking library
(here d3d11) in the try_compile() function in OpenCVDetectDirectX.cmake file.
Also add a message if the first DirectX check fails.
* gapi: Fix compilation with mingw
These changes remove MSVC specific pragma directive. The compilation fails at
linking time due to absence of proper linking library. The required libraries
are added in corresponding CMakeLists.txt file.
* samples: Fix compilation with mingw
These changes remove MSVC specific pragma directive. The compilation fails at
linking time due to absence of proper linking library. The required libraries
are added in corresponding CMakeLists.txt file.
variables refactoring
levmarq fix
initIntrinsicParams2D() refactoring
undo LM fix
cameraCalcJErr: made a lambda; warnings fixed; vars rearranged & renamed, jacobian buffers, perViewErrors and allErrors fix, etc.
stereoCalibrate: internal vars in callback
stereoCalibrate: capture only useful variables
stereoCalibrate: perViewError fix + minors
rvecs and tvecs are not pointers anymore
no extra lambda
newObjPoints: no pointers
stdDevs: no pointers
_Jo removed: not used
Range::all() -> rowRange, colRange
param and mask are std::vectors now
indices shortened
tabs
less func-scoped vars; TODOs
less formatting & renaming changes
trailing whitespaces
less diff
less changes
less changes
Range::all() back
perViewErr ptr fix
NINTRINSIC captured
try to fix warning
trying to fix a warning
fix warnings, another attempt
* Allow the number of threads FFMpeg uses to be selected during VideoCapture::open().
Reset interupt timer in grab if
err = avformat_find_stream_info(ic, NULL);
is interupted but open is successful.
* Correct the returned number of threads and amend test cases.
* Update container test case.
* Reverse changes added to existing videoio_container test case and include test combining thread change and raw read in the newly added videoio_read test case.
In some situations the last value was missing from the discrete theta
values. Now, the last value is chosen such that it is close to the
user-provided maximum theta, while the distance to pi remains always
at least theta_step/2. This should avoid duplicate detections.
A better way would probably be to use max_theta as is and adjust the
resolution (theta_step) instead, such that the discretization would
always be uniform (in a circular sense) when full angle range is used.
RgbdNormals: setMethod() removed as useless
RgbdNormals: tests + cross product, to be fixed
+ cross product
LINEMOD: diffThreshold param added + tests fixed
minor
diffThreshold fix
points3dToDepth16U fix
normals computer diffThreshold fix
random plane generation fixed + diffThreshold fix
Rendered normals test rewritten to GTest Params
random plane generation: scale
RGBD_Normals tests: thresholds tuned
Rendered normals tests: 64F support added
Random planes normal tests rewritten to GTest Params
LINEMOD and CrossProduct fix
SRI threshold raised
NormalsRandomPlanes: thresholds raised
assert on unknown alg; minor
fix
frame size reduced
TIFF replaced by YAML.GZ
depthTo3d test changed
cv::transform is used
fix warning
nanMask()
flipAxes()
absDotPixel() + forgotten code
helper functions removed
RGBDNormals: checkNormals() and compare LINEMOD's pts3d to depth input
Rendered: another criteria; thresholds; LINEMOD's pts3d to depth input comparison
thresholds raised a bit
SRI slightly optimized
assert change
normal tests refactored, parametrized, split
trailing namespace, thresholds raised
SRI caching optimized a lot
normal tests rewritten to fixture, no loop
minor
runCase() joined with testIt()
thresholds were put into GTest params
ternary operator
RgbdNormalsTest merged into NormalsRandomPlanes; RgbdPlanes moved closer to tests
normal test minor refactoring
plane finder tests refactored to GTest Params
skip tests
thresholds raised
plane test minor
plane tests: timers dropped, nPlanes put into GTest Params; refactoring
generated normals tests: minor refactoring
flipAxes() templated
rendered normals tests refactored: thresholds to GTest Params
CV_Error -> ASSERT_FALSE
This fixes the following error with mingw toolchain:
opencv/modules/videoio/src/cap_msmf.cpp:1020: error: 'wstring_convert' is not a member of 'std'
1020 | std::wstring_convert<std::codecvt_utf8_utf16<wchar_t>> conv;
| ^~~~~~~~~~~~~~~
opencv/modules/videoio/src/cap_ffmpeg_hw.hpp:230:26: error: 'wstring_convert' is not a member of 'std'
230 | std::wstring_convert<std::codecvt_utf8_utf16<wchar_t>> conv;
| ^~~~~~~~~~~~~~~
The locale header is required according to C++ standard.
See https://en.cppreference.com/w/cpp/locale/wstring_convert
This fixes the following error with mingw toolchain:
opencv/modules/videoio/src/cap_obsensor/obsensor_stream_channel_msmf.hpp:160:10: error: 'condition_variable' in namespace 'std' does not name a type
160 | std::condition_variable streamStateCv_;
| ^~~~~~~~~~~~~~~~~~
libstdc++ that comes with gcc 4.8 doesn't
define `getline(basic_istream<char>&&, std::string&)`
even if it's part of the c++11 standard.
However we can still use the following:
`getline(basic_istream<char>&, std::string&)`.
* videoio: add support for obsensor (Orbbec RGB-D Camera )
* obsensor: code format issues fixed and some code optimized
* obsensor: fix typo and format issues
* obsensor: fix crosses initialization error
[GSoC] New universal intrinsic backend for RVV
* Add new rvv backend (partially implemented).
* Modify the framework of Universal Intrinsic.
* Add CV_SIMD macro guards to current UI code.
* Use vlanes() instead of nlanes.
* Modify the UI test.
* Enable the new RVV (scalable) backend.
* Remove whitespace.
* Rename and some others modify.
* Update intrin.hpp but still not work on AVX/SSE
* Update conditional compilation macros.
* Use static variable for vlanes.
* Use max_nlanes for array defining.
Reimplementation of Element-wise layers with broadcasting support
* init
* semi-working initial version
* add small_vector
* wip
* remove smallvec
* add nary function
* replace auto with Mat in lambda expr used in transform
* uncomment asserts
* autobuffer shape_buf & step_buf
* fix a missing bracket
* fixed a missing addLayer in parseElementWise
* solve one-dimensional broadcast
* remove pre_broadcast_transform for the case of two constants; fix missing constBlobsExtraInfo when addConstant is called
* one autobuffer for step & shape
* temporal fix for the missing original dimension information
* fix parseUnsqueeze when it gets a 1d tensor constant
* support sum/mean/min/max with only one input
* reuse old code to handle cases of two non-constant inputs
* add condition to handle div & mul of two non-constant inputs
* use || instead of or
* remove trainling spaces
* enlarge buf in binary_forward to contain other buffer
* use autobuffer in nary_forward
* generate data randomly and add more cases for perf
* add op and, or & xor
* update perf_dnn
* remove some comments
* remove legacy; add two ONNX conformance tests in filter
* move from cpu_denylist to all_denylist
* adjust parsing for inputs>=2
Co-authored-by: fengyuentau <yuantao.feng@opencv.org.cn>
- Add conditional compilation directives to replace deprecated std::random_shuffle with new std::shuffle when C++11 is available.
- Set random seed to a fixed value before shuffling containers to ensure reproducibility.
Resolvesopencv/opencv#22209.
Add conditional compilation directives to enable uses of std::chrono on supported compilers. Use std::chrono::steady_clock as a source to retrieve current tick count and clock frequency.
Fixesopencv/opencv#6902.
Add per_tensor_quantize to int8 quantize
* add per_tensor_quantize to dnn int8 module.
* change api flag from perTensor to perChannel, and recognize quantize type and onnx importer.
* change the default to hpp
It's not clear how ranges argument should be used in the overload of
calcHist that accepts std::vector. The main overload uses array of
arrays there, while std::vector overload uses a plain array. The code
interprets the vector as a flattened array and rebuilds array of arrays
from it. This is not obvious interpretation, so documentation has been
added to explain the expected usage.
DNN: Accelerating convolution
* Fast Conv of ARM, X86 and universal intrinsics.
* improve code style.
* error fixed.
* improve the License
* optimize memory allocated and Adjust the threshold.
* change FasterRCNN_vgg16 to 2GB memory.
-enable using -DWITH_WAYLAND=ON
-adapted from https://github.com/pfpacket/opencv-wayland
-using xdg_shell stable protocol
-overrides HAVE_QT if HAVE_WAYLAND and WITH_WAYLAND are set
Signed-off-by: Joel Winarske <joel.winarske@gmail.com>
Co-authored-by: Ryo Munakata <afpacket@gmail.com>
Replaced sprintf with safer snprintf
* Straightforward replacement of sprintf with safer snprintf
* Trickier replacement of sprintf with safer snprintf
Some functions were changed to take another parameter: the size of the buffer, so that they can pass that size on to snprintf.
Fix issue 22015, let Clip layer support 1-3 inputs
* Fix issue 22015.
Let layer Clip support 1-3 inputs.
* Resolve other problems caused by modifications
* Update onnx_importer.cpp
added extra checks to min/max handling in Clip
* Add assertions to check the size of the input
* Add test for clip with min and max initializers
* Separate test for "clip_init_min_max". Change the check method for input_size to provide a clearer message in case of problem.
* Add tests for clip with min or max initializers
* Change the implementation of getting input
Co-authored-by: Vadim Pisarevsky <vadim.pisarevsky@gmail.com>
Fix sampling for version multiplying factor
* reduce experimentalFrequencyElem and listFrequencyElem
* fix large resize
* fix tile in postIntermediate
* add getMinSideLen(), add corrected_index
* add test decode_regression_21929 author Kumataro, add test decode_regression_version_25
* objdetect: qrcode_encoder: fix to missing timing pattern
* objdetect: qrcode_encoder: Add SCOPED_TRACE() and replace CV_Assert() to ASSERT_EQ().
- Add SCOPED_TRACE() for version loop.
- Replace CV_Assert() to ASSERT_EQ().
- Rename expect_msg to msg.
Add normal estimation and region growing algorithm for point cloud
* Add normal estimation and region growing algorithm for point cloud
* 1.Modified documentation for normal estimation;2.Converted curvature in region growing to absolute values;3.Changed the data type of threshold from float to double;4.Fixed some bugs;
* Finished documentation
* Add tests for normal estimation. Test the normal and curvature of each point in the plane and sphere of the point cloud.
* Fix some warnings caused by to small numbers in test
* Change the test to calculate the average difference instead of comparing each normal and curvature
* Fixed the bugs found by testing
* Redesigned the interface and fixed problems:
1. Make the interface compatible with radius search.
2. Make region growing optionally sortable on results.
3. Modified the region growing interface.
4. Format reference.
5. Removed sphere test.
* Fix warnings
* Remove flann dependency
* Move the flann dependency to the corresponding test
Some GStreamer elements may produce buffers with very non
standard strides, offsets and/or even transport each plane
in different, non-contiguous pointers. This non-standard
layout is communicated via GstVideoMeta structures attached
to the buffers. Given this, when a GstVideoMeta is available,
one should parse the layout from it instead of generating
a generic one from the caps.
The GstVideoFrame utility does precisely this: if the buffer
contains a video meta, it uses that to fill the format and
memory layout. If there is no meta available, the layout is
inferred from the caps.
* Added support for 4B RGB V4L2 pixel formats
Added support for V4L2_PIX_FMT_XBGR32 and V4L2_PIX_FMT_ABGR32 pixel
formats.
* Added workaround for missing V4L2_PIX_FMT_ABGR32 and V4L2_PIX_FMT_XBGR32
defines
Fixes and optimizations for the SQPnP solver
* Fixes and optimizations
- optimized the calculation of qa_sum by moving equal elements outside the loop
- unrolled copying of the lower triangle of omega
- substituted SVD with eigendecomposition in the factorization of omega (2-3 times faster)
- fixed the initialization of lambda in FOAM
- added a cheirality test that checks a solution on all 3D points rather than on their mean. The old test rejected valid poses in some cases
- fixed some typos & errors in comments
* reverted to SVD
Eigen decomposition seems to yield larger errors in certain tests, reverted to SVD
* nearestRotationMatrixSVD
Added nearestRotationMatrixSVD()
Previous nearestRotationMatrix() renamed to nearestRotationMatrixFOAM() and reverts to nearestRotationMatrixSVD() for singular matrices
* fixed checks order
Fixed the order of checks in PoseSolver::solveInternal()
GSoC module to save and load point cloud
* Add functionality to read point cloud data from files
* address issues found on review, add tests for mesh, refactor
* enable fail-safe execution and empty arrays as output
* Some improvements for point cloud io module
Co-authored-by: Julie Bareeva <julia.bareeva@xperience.ai>
Add undistortImagePoints function
* Add undistortImagePoints function
undistortPoints has unclear interface and additional functionality. New function computes only undistorted image points position
* Add undistortImagePoints test
* Add TermCriteria
* Fix layout
If there will be measurement before the next predict, `statePost` would be assigned to updated value. So I guess these steps are meant to handle when no measurement and KF only do the predict step.
```cpp
statePre.copyTo(statePost);
errorCovPre.copyTo(errorCovPost);
```
In test_imgproc.js, the test_filter suite's last test assigns a variable
to `size` without declaring it with `let`, polluting the global scope.
This commit adds `let` to the statement, so that the variable is scoped
to the test block.
Add distort/undistort test for fisheye::undistortPoints()
* Add distort/undistort test for fisheye::undistortPoints()
Lack of test has allowed error described in 19138 to be unnoticed.
In addition to random points, four corners and principal center
added to point set
* Add random distortion coefficients set
* Move undistortPoints test to google test, refactor
* Add fisheye::undistortPoints() perf test
* Add negative distortion coefficients to undistortPoints test, increase value
* Move to theRNG()
* Change test check from cvtest::norm(L2) to EXPECT_MAT_NEAR()
* Layout fix
* Add points number parameters, comments
[GAPI] Support basic inference in OAK backend
* Combined commit which enables basic inference and other extra capabilities of OAK backend
* Remove unnecessary target options from the cmakelist
Fixed out-of-bounds read in parallel version of ippGaussianBlur()
* Fixed out-of-memory read in parallel version of ippGaussianBlur()
* Fixed check
* Revert changes in CMakeLists.txt
Fixed handling of new stream, especially for stateful OCV kernels
* Fixed handling of new stream, especially for stateful OCV kernels
* Removed duplication from StateInitOnce tests
* Addressed review comments for PR #21731
- Fixed explanation comments
- Expanded test for stateful OCV kernels in Regular mode
* Addressed review comments for PR #21731
- Moved notification about new stream to the constructor
- Added test on state reset for Regular mode
* Addresed review comments
* Addressed review comments
Co-authored-by: Ruslan Garnov <ruslan.garnov@intel.com>
python binding for matches and inliers_mask attributes of cv2.detail_MatchesInfo class
* making matches and inliers_mask attributes of cv2.detail_MatchesInfo class accessible from python interface
* binding test for cv2.detail_MatchesInfo class
[G-API] Handle exceptions in streaming executor
* Handle exceptions in streaming executor
* Rethrow exception in non-streaming executor
* Clean up
* Put more tests
* Handle exceptions in IE backend
* Handle exception in IE callbacks
* Handle exception in GExecutor
* Handle all exceptions in IE backend
* Not only (std::exception& e)
* Fix comments to review
* Handle input exception in generic way
* Fix comment
* Clean up
* Apply review comments
* Put more comments
* Fix alignment
* Move test outside of HAVE_NGRAPH
* Fix compilation
/wrkdirs/usr/ports/graphics/opencv/work/opencv-4.5.5/modules/core/include/opencv2/core/vsx_utils.hpp:352:12: warning: 'vec_permi' macro redefined [-Wmacro-redefined]
# define vec_permi(a, b, c) vec_xxpermdi(b, a, (3 ^ (((c) & 1) << 1 | (c) >> 1)))
^
/usr/lib/clang/13.0.0/include/altivec.h:13077:9: note: previous definition is here
#define vec_permi(__a, __b, __c) \
^
/wrkdirs/usr/ports/graphics/opencv/work/opencv-4.5.5/modules/core/include/opencv2/core/vsx_utils.hpp:370:25: error: redefinition of 'vec_promote'
VSX_FINLINE(vec_dword2) vec_promote(long long a, int b)
^
/usr/lib/clang/13.0.0/include/altivec.h:14604:1: note: previous definition is here
vec_promote(signed long long __a, int __b) {
^
/wrkdirs/usr/ports/graphics/opencv/work/opencv-4.5.5/modules/core/include/opencv2/core/vsx_utils.hpp:377:26: error: redefinition of 'vec_promote'
VSX_FINLINE(vec_udword2) vec_promote(unsigned long long a, int b)
^
/usr/lib/clang/13.0.0/include/altivec.h:14611:1: note: previous definition is here
vec_promote(unsigned long long __a, int __b) {
^
/wrkdirs/usr/ports/graphics/opencv/work/opencv-4.5.5/modules/core/include/opencv2/core/hal/intrin_vsx.hpp:1045:22: error: call to 'vec_rsqrt' is ambiguous
{ return v_float32x4(vec_rsqrt(x.val)); }
^~~~~~~~~
/usr/lib/clang/13.0.0/include/altivec.h:8472:34: note: candidate function
static vector float __ATTRS_o_ai vec_rsqrt(vector float __a) {
^
/wrkdirs/usr/ports/graphics/opencv/work/opencv-4.5.5/modules/core/include/opencv2/core/vsx_utils.hpp:362:29: note: candidate function
VSX_FINLINE(vec_float4) vec_rsqrt(const vec_float4& a)
^
/wrkdirs/usr/ports/graphics/opencv/work/opencv-4.5.5/modules/core/include/opencv2/core/hal/intrin_vsx.hpp:1047:22: error: call to 'vec_rsqrt' is ambiguous
{ return v_float64x2(vec_rsqrt(x.val)); }
^~~~~~~~~
/usr/lib/clang/13.0.0/include/altivec.h:8477:35: note: candidate function
static vector double __ATTRS_o_ai vec_rsqrt(vector double __a) {
^
/wrkdirs/usr/ports/graphics/opencv/work/opencv-4.5.5/modules/core/include/opencv2/core/vsx_utils.hpp:365:30: note: candidate function
VSX_FINLINE(vec_double2) vec_rsqrt(const vec_double2& a)
^
1 warning and 4 errors generated.
The specific functions were added to altivec.h in LLVM's 1ff93618e58df210def48d26878c20a1b414d900, c3da07d216dd20fbdb7302fd085c0a59e189ae3d and 10cc5bcd868c433f9a781aef82178b04e98bd098.
* better accuracy of _rotatedRectangleIntersection
instead of just migrating to double-precision (which would work), some computations are scaled by a factor that depends on the length of the smallest vectors.
There is a better accuracy even with floats, so this is certainly better for very sensitive cases
* Update intersection.cpp
use L2SQR norm to tune the numeric scale
* Update intersection.cpp
adapt samePointEps with L2 norm
* Update intersection.cpp
move comment
* Update intersection.cpp
fix wrong numericalScalingFactor usage
* added tests
* fixed warnings returned by buildbot
* modifications suggested by reviewer
renaming numericalScaleFctor to normalizationScale
refactor some computations
more "const"
* modifications as suggested by reviewer
Fix LSTM support in ONNX
* fix LSTM and add peephole support
* disable old tests
* turn lambdas into functions
* more hacks for c++98
* add assertions
* slice fixes
* backport of cuda-related fixes
* address review comments
Add 10-12-14bit (integer) TIFF decoding support
* Add 12bit (integer) TIFF decoding support
An (slow) unpacking step is inserted when the native bpp is not equal to the dst_bpp
Currently, I do not know if there can be several packing flavours in TIFF data.
* added tests
* move sample files to opencv_extra
* added 10b and 14b unpacking
* fix compilation for non MSVC compilers by using more standard typedefs
* yet another typdef usage change to fix buildbot Mac compilation
* fixed unpacking of partial packets
* fixed warnings returned by buildbot
* modifications as suggested by reviewer
* add apply softmax option to ClassificationModel
* remove default arguments of ClassificationModel::setSoftMax()
* fix build for python
* fix docs warning for setSoftMax()
* add impl for ClassficationModel()
* fix failed build for docs by trailing whitespace
* move to implement classify() to ClassificationModel_Impl
* move to implement softmax() to ClassificationModel_Impl
* remove softmax from public method in ClassificationModel
All classes are registered in the scope that corresponds to C++
namespace or exported class.
Example:
`cv::ml::Boost` is exported as `cv.ml.Boost`
`cv::SimpleBlobDetector::Params` is exported as
`cv.SimpleBlobDetector.Params`
For backward compatibility all classes are registered in the global
module with their mangling name containing scope information.
Example:
`cv::ml::Boost` has `cv.ml_Boost` alias to `cv.ml.Boost` type
Optimize cv::applyColorMap() for simple case
* Optimize cv::applyColorMap() for simple case
PR for 21640
For regular cv::Mat CV_8UC1 src, applying the colormap is simpler than calling the cv::LUT() mechanism.
* add support for src as CV_8UC3
src as CV_8UC3 is handled with a BGR2GRAY conversion, the same optimized code being used afterwards
* code style
rely on cv::Mat.ptr() to index data
* Move new implementation to ColorMap::operator()
Changes as suggested by reviewer
* style
improvements suggsted by reviewer
* typo
* tune parallel work
* better usage of parallel_for_
use nstripes parameter of parallel_for_
assume _lut is continuous to bring faster pixel indexing
optimize src/dst access by contiguous rows of pixels
do not locally copy the LUT any more, it is no more relevant with the new optimizations
* Added NEON support in builds for Windows on ARM
* Fixed `HAVE_CPU_NEON_SUPPORT` display broken during compiler test
* Fixed a build error prior to Visual Studio 2022
4.x: submodule or a class scope for exported classes
* feature: submodule or a class scope for exported classes
All classes are registered in the scope that corresponds to C++
namespace or exported class.
Example:
`cv::ml::Boost` is exported as `cv.ml.Boost`
`cv::SimpleBlobDetector::Params` is exported as
`cv.SimpleBlobDetector.Params`
For backward compatibility all classes are registered in the global
module with their mangling name containing scope information.
Example:
`cv::ml::Boost` has `cv.ml_Boost` alias to `cv.ml.Boost` type
* refactor: remove redundant GAPI aliases
* fix: use explicit string literals in CVPY_TYPE macro
* fix: add handling for class aliases
Use YuNet of fixed input shape to fix not-supported-dynamic-zero-shape for FaceDetectorYN
* use yunet with input of fixed shape
* update yunet used in face recognition regression
Thread Sanitizer identified an incorrect implementation of double checked locking.
Replaced it with a static, which therefore can only be created once.
Default FFMPEG VideoCapture backend to rtsp_flags=prefer_tcp
* Make the VideoCapture ffmpeg backends default rtsp connection type prefer_tcp.
* Ensure that the ffmpeg version of avformat is checked.
Per intel docs for libva, when vaDeriveImage fails vaCreateImage +
vaPutImage should be tried. This is important as mesa with AMD HW
will always fail because the image is interlaced so a indirect
method must be used to get the surface to/from and image
Fixes https://github.com/opencv/opencv/issues/21536
* Fix wrong MSAN errors.
Because Fortran is called in Lapack, MSAN does not think the memory
has been written even though it is the case.
MSAN does no support well cross-language memory analysis.
* Make a dedicated check.
- Add special case handling when submodule has the same name as parent
- `PyDict_SetItemString` doesn't steal reference, so reference count
should be explicitly decremented to transfer object life-time
ownership
- Add sanity checks for module registration input
- Add Python 2 and Python 3 reference counting handling
G-API: Wrap GStreamerSource
* Wrap GStreamerSource into python
* Fixed test skipping when can't make Gst-src
* Wrapped GStreamerPipeline class, added dummy test for it
* Fix no_gst testing
* Changed wrap for GStreamerPipeline::getStreamingSource() : now python-specific in-class method GStreamerPipeline::get_streaming_source()
* Added accuracy tests vs OCV:VideoCapture(Gstreamer)
* Add skipping when can't use VideoCapture(GSTREAMER);
Add better handling of GStreamer backend unavailable;
Changed video to avoid terminations
* Applying comments
* back to a separate get_streaming_source function, with comment
Co-authored-by: OrestChura <orest.chura@intel.com>
G-API: oneVPL DX11 inference
* Draft GPU infer
* Fix incorrect subresource_id for array of textures
* Fix for TheOneSurface in different Frames
* Turn on VPP param configuration
* Add cropIn params
* Remove infer sync sample
* Remove comments
* Remove DX11AllocResource extra init
* Add condition for NV12 processing in giebackend
* Add VPP frames pool param configurable
* -M Remove extra WARN & INFOs, Fix custom MAC
* Remove global vars from example, Fix some comments, Disable blobParam due to OV issue
* Conflict resolving
* Revert back pointer cast for cv::any
clang-cl defines both __clang__ and _MSC_VER, yet uses `#pragma GCC` to disable certain diagnostics.
At the time `-Wreturn-type-c-linkage` was reported by clang-cl.
This PR fixes this behavior by reordering defines.
- Add special case handling when submodule has the same name as parent
- `PyDict_SetItemString` doesn't steal reference, so reference count
should be explicitly decremented to transfer object life-time
ownership
- Add sanity checks for module registration input
Comment from Python documentation:
Unlike other functions that steal references, `PyModule_AddObject()` only
decrements the reference count of value on success.
This means that its return value must be checked, and calling code must
`Py_DECREF()` value manually on error.
GAPI: Add OAK backend
* Initial tests and cmake integration
* Add a public header and change tests
* Stub initial empty template for the OAK backend
* WIP
* WIP
* WIP
* WIP
* Runtime dai hang debug
* Refactoring
* Fix hang and debug frame data
* Fix frame size
* Fix data size issue
* Move test code to sample
* tmp refactoring
* WIP: Code refactoring except for the backend
* WIP: Add non-camera sample
* Fix samples
* Backend refactoring wip
* Backend rework wip
* Backend rework wip
* Remove mat encoder
* Fix namespace
* Minor backend fixes
* Fix hetero sample and refactor backend
* Change linking logic in the backend
* Fix oak sample
* Fix working with ins/outs in OAK island
* Trying to fix nv12 problem
* Make both samples work
* Small refactoring
* Remove meta args
* WIP refactoring kernel API
* Change in/out args API for kernels
* Fix build
* Fix cmake warning
* Partially address review comments
* Partially address review comments
* Address remaining comments
* Add memory ownership
* Change pointer-to-pointer to reference-to-pointer
* Remove unnecessary reference wrappers
* Apply review comments
* Check that graph contains only one OAK island
* Minor refactoring
* Address review comments
Add support for 3D point cloud segmentation, using the USAC framework.
* Modify the RANSAC framework in usac such that RANSAC can be used in 3D point cloud segmentation.
* 1. Add support for 3D point cloud segmentation, using the USAC framework.
2. Add solvers, error estimators for plane model and sphere model.
* Added code samples to the comments of class SACSegmentation.
* 1. Update the segment interface parameters of SACSegmentation.
2. Fix some errors in variable naming.
* Add tests for plane detection.
* 1. Add tests for sphere segmentation.
2. Fix some bugs found by tests.
3. Rename "segmentation" to "sac segmentation".
4. Rename "detect" to "segment".
TODO: Too much duplicate code, the structure of the test needs to be rebuilt.
* 1. Use SIMD acceleration for plane model and sphere model error estimation.
2. Optimize the RansacQualityImpl#getScore function to avoid multiple calls to the error#getError function.
3. Fix a warning in test_sac_segmentation.cpp.
* 1. Fix the warning of ModelConstraintFunction ambiguity.
2. Fix warning: no previous declaration for'void cv::usac::modelParamsToUsacConfig(cv::Ptr<cv::usac::SimpleUsacConfig>&, const cv::Ptr<const cv::usac::Model>& )
* Fix a warning in test_sac_segmentation.cpp about direct comparison of different types of data.
* Add code comments related to the interpretation of model coefficients.
* Update the use of custom model constraint functions.
* Simplified test code structure.
* Update the method of checking plane models.
* Delete test for cylinder.
* Add some comments about UniversalRANSAC.
* 1. The RANSAC paper in the code comments is referenced using the bibtex format.
2. The sample code in the code comments is replaced using @snippet.
3. Change the public API class SACSegmentation to interface.
4. Clean up the old useless code.
* fix warning(no previous declaration) in 3d_sac_segmentation.cpp.
* Fix compilation errors caused by 3d_sac_segmentation.cpp.
* Move the function sacModelMinimumSampleSize() from ptcloud.hpp to sac_segmentation.cpp.
* 1. Change the interface for setting the number of threads to the interface for setting whether to be parallel.
2. Move interface implementation code in ptcloud_utils.hpp to ptcloud_utils.cpp.
* SACSegmentation no longer inherits Algorithm.
* Add the constructor and destructor of SACSegmentation.
* 1. For the declaration of the common API, the prefix and suffix of the parameter names no longer contain underscores.
2. Rename the function _getMatFromInputArray -> getPointsMatFromInputArray.
3. Change part of CV_CheckDepth to CV_CheckDepthEQ.
4. Remove the doxygen flag from the source code.
5. Update the loop termination condition of SIMD in the point cloud section of 3D module.
* fix warning: passing 'bool' chooses 'int' over 'size_t {aka unsigned int}' .
* fix warning: passing 'bool' chooses 'int' over 'size_t {aka unsigned int}' .
The Qt backend directly calls some OpenGL functions (glClear, glHint,
glViewport), but since OCV 4.5.5 the GL libraries are no longer part
of the global extra dependencies. When linking with "-Wl,--no-undefined"
this causes linker errors:
`opencv-4.5.5/modules/highgui/src/window_QT.cpp:3307: undefined reference to `glClear'`
Fixes: #21346
Related issues: #21299
* Fix compile against lapack-3.10.0
Fix compilation against lapack >= 3.9.1 and 3.10.0 while not breaking older versions
OpenCVFindLAPACK.cmake & CMakeLists.txt: determine OPENCV_USE_LAPACK_PREFIX from LAPACK_VERSION
hal_internal.cpp : Only apply LAPACK_FUNC to functions whose number of inputs depends on LAPACK_FORTRAN_STR_LEN in lapack >= 3.9.1
lapack_check.cpp : remove LAPACK_FUNC which is not OK as function are not used with input parameters (so lapack.h preprocessing of "LAPACK_xxxx(...)" is not applicable with lapack >= 3.9.1
If not removed lapack_check fails so LAPACK is deactivated in build (not want we want)
use OCV_ prefix and don't use Global, instead generate OCV_LAPACK_FUNC depending on CMake Conditions
Remove CONFIG from find_package(LAPACK) and use LAPACK_GLOBAL and LAPACK_NAME to figure out if using netlib's reference LAPACK implementation and how to #define OCV_LAPACK_FUNC(f)
* Fix typos and grammar in comments
Fixed threshold(THRESH_TOZERO) at imgproc(IPP)
* Fixed#16085: imgproc(IPP): wrong result from threshold(THRESH_TOZERO)
* 1. Added test cases with float where all bits of mantissa equal 1, min and max float as inputs
2. Used nextafterf instead of cast to hex
* Used float value in test instead of hex and casts
* Changed input value in test
{kind=link}